


Ammaryň kireýine berilýän bahasy ammar we logistika kärhanalary üçin elmydama uly agyry boldy. Hagris mundan beýläk müşderiler üçin gymmatlyk döretdi we täjirçilik gonuş taslamalaryny amala aşyryp bilýän, müşderiler üçin ammar ýerleriniň ulanylyş derejesini ýokarlandyrmak we ýokary dykyzlykly ammarlary amala aşyrmak üçin goşa çuň guty saklaýan robot hegerls a42d resmi taýdan işe girizdi. Içerde we daşary ýurtda ilkinji goşa çuň bin roboty hökmünde, kubo hegerls a42d saklanyş dykyzlygy meselesini çözmek üçin ýörite işlenip düzüldi.
Garaşsyzlar tarapyndan özbaşdak işlenip düzülen Hegerls a42d, goşa çuňňur pozisiýaly robot bolup, daşary ýurtlarda ilkinji bolup durýar. Iki goşa pozisiýa saýlamak funksiýasy bar. Awtonom ykjam robotyň çeýeligini saklamak bilen, ammaryň saklanyş dykyzlygyny ep-esli gowulandyrýar we özboluşly awtomatlaşdyrylan ammar çözgüdini üpjün edýär. Iki gatly pozisiýaly robot “Hegerls a42d” bazary täze innowasiýa tehnologiýasy bilen üpjün edýär. "Tehnologiýa täzelikçisi" hökmünde baha berildi, sebäbi "ammar işiniň täzeligini üýtgedýär, ammaryň işiniň netijeliligini ýokarlandyrýar we ýerleşdirmek, goldamak we işlemek aňsat".
“Hago” tarapyndan özbaşdak işlenip düzülen Kubao roboty, täjirçilik gonuşyny döreden we amala aşyran ilkinji guty görnüşli ammar robotydyr we “konteýner robot” we “konteýner robot” bölüm bölümlerini açdy. Üznüksiz gaýtalama we tehnologiki täzeliklerden soň, kubao-nyň önüm liniýasy has köp baýlaşdy, köp önümli robot otlary A42, goşa çuň bin robot otlary a42d, karton sortlaýjy robot otlary a42n, teleskopik göteriji bin robot otlary ýaly dürli önümleri öz içine alýar. a42t we lazer slam köp gatly bin robot otlary A42 slam, ammar agyry nokatlaryny çözmek, ammar amallarynyň netijeliligini ýokarlandyrmak, amal çykdajylaryny azaltmak we ammar awtomatizasiýasynyň kämilleşdirilmegine ýetmek üçin kömek edýär.

Hegerls hakda a42d goşa çuňlukdaky bin roboty
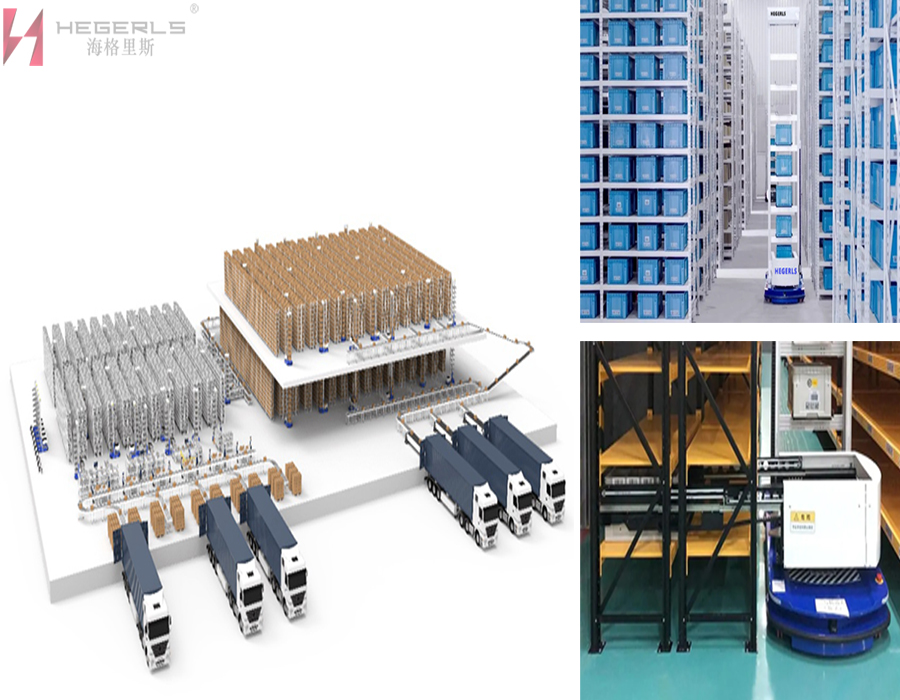
“Hegerls a42d” goşa çuňlukdaky material guty roboty, material gutularyny akylly saýlamagy we saklamagy we bir wagtyň özünde birnäçe material gutusyny dolandyrmagy amala aşyryp biler (bir saparyň iň ýokary ýüki 300 kg ýetip biler). “Hegerls a42d” köp gatly bin robotynyň esasynda, uzaldylan teleskopik çeňňegiň özbaşdak innowasiýa gözlegleri we işlenip düzülmegi, tekjäniň gapagyny saýlamak we ýerleşdirmek we saklamagyň dykyzlygyny ep-esli ýokarlandyryp biler. Täze akylly logistika işleýiş enjamy hökmünde, a42d hegerler, hiç bir yzarlaýyş enjamynyň kömegi bilen ammarda akylly ýöremegi amala aşyryp biler. Awtonom nawigasiýa, işjeň päsgelçiliklerden gaça durmak we awtomatiki zarýad bermek funksiýalaryna eýedir. Adaty AGV “tekjä adama” çözgüdi bilen deňeşdirilende, a42d goşa çuňlukly robotyň has kiçi saýlama granulasy bar. Ulgam tarapyndan berlen sargyt talaplaryna laýyklykda, adaty “haryt gözleýän adamlardan” täsirli we ýönekeý “harytlara adama” akylly seçip alyş tertibine öwrülmegi hakykatdanam durmuşa geçirilýär. Staker we awtomatiki üç ölçegli ammaryň çözgütleri bilen deňeşdirilende, he42 a42d goşa çuň bin robot ulgamy netijeli ýerleşdirilip bilner, umumy ýerleşdiriş bahasy pes we has çeýeligi bilen; Şol bir wagtyň özünde, hegerls a42d tekjeler, gizlin AGV-ler, robot ýaraglar, köp funksiýaly iş stansiýalary we ş.m. ýaly dürli logistika enjamlary bilen dokamagy goldaýar. saklamagyň işleýiş netijeliligi, ammar dykyzlygyny optimallaşdyrýar we ammar pudagynyň awtomatlaşdyrylyşyny we akylly üýtgemegini amala aşyrýar. Ulanylýan ssenariýa: 3PL, aýakgap we egin-eşik, elektron söwda, elektronika, elektrik energiýasy, önümçilik, lukmançylyk, bölek we beýleki pudaklarda ammar programmalaryna degişlidir.

Hegerls a42d goşa çuňňur pozisiýa bin robotynyň aýratynlyklary
“Hegerls a42d” goşa çuňlukly robotyň özboluşly we teleskopik çeňňegi bar, ol bir wagtyň özünde çuň we ýalpak gaplary saýlap alyp biler, ammarda 5 metr goşa çuň tekjeleriň ulanylmagyny goldap biler, ýol meýdançasyny 50% -e çenli azaldyp biler we ýokarlandyryp biler. saklaýyş dykyzlygy adaty el ammary bilen deňeşdirilende 130% ýokarlanýar. Akylly dolandyryş platformasy tarapyndan üpjün edilen akylly algoritm optimizasiýasyna esaslanyp, ge42 a42d amaly netijeliligini üpjün etmek we saklanyş dykyzlygynyň we saklanyş netijeliliginiň goşa optimizasiýasyny durmuşa geçirmek üçin täze saýlama usuly we ýerleşiş strategiýasyny kabul edýär. Şol bir wagtyň özünde, umumy çözgüt iş ssenarisine gabat gelip biler, köp sanly gap-gaçlary akylly saýlamagy, işlemegi we saklamagy, iş prosesini optimizirlemegi we saklamagyň netijeliligini ýokarlandyryp biler.

Gegerlleriň funksional aýratynlyklary we artykmaçlyklary a42d goşa çuňňur pozisiýa bin roboty
Ø30% UP! Ahyrky dykyzlyk
Gegerls a42d zolaklaryň sanyny azaltmak we ammar ýerleriniň ulanylyşyny gowulandyrmak üçin goşa çuň tekjeleri kabul edýär. A42 ýeke çuňluk ulgamy bilen deňeşdirilende, saklaýyş dykyzlygy 30% ýokarlandyrylyp bilner.
Arm uzyn gol ägirt, goşa çuňňur giriş
“Hagerls” goşa çuňňur pozisiýa ulgamy a42d, teleskopik wilkany asyl A42 esasynda özgertdi, şonuň üçin goşa çuňňur pozisiýaly robot bir wagtyň özünde çuň we çuň ýerleriň gaplaryny alyp we ýerleşdirip biler. Haiq programma üpjünçiligi platformasynyň algoritm meýilnamasyna esaslanyp, amatly dykyzlygy we netijeliligi bilen akylly saklamagy we garaşsyz saýlamagy amala aşyrýar.
Ø akylly optimizasiýa, goşa çuňluk strategiýasy
Iki çuňlukly tekjeleriň “ilki bilen, iň soňunda” (Filo) ýörelgesi sebäpli adaty goşa çuňlukdaky awtomatiki enjamlar diňe bir wagtyň özünde harytlary alyp we ýerleşdirip biler ýa-da harytlary almak we ýerleşdirmek üçin haryt guýmak usulyny ulanyp biler. . Jübüt çuňňur ýerleşiş a42d ulgamy, dürli iş ssenarileri üçin akylly ýerleşiş optimizasiýa strategiýalaryny düzýär:
sowuk we gyzgyn saklanylýan ýeri tertipleşdirmek amaly strategiýasy
baglanyşykly ammaryň ýerleşişini tertipleşdirmegiň iş strategiýasy

Hagris topary, optimizasiýa strategiýasy, müşderi taslamalary üçin ýöriteleşdirilen we täsirli simulýasiýa bilen birleşdirilen goşa çuňluk ssenariýasy üçin simulýasiýa ulgamyny özleşdirdi we goşa çuňlugyň optimal çözgüdini üpjün etdi. Hagris elmydama müşderileriň üstünligini öz wezipesi hökmünde kabul edýär we müşderiler üçin saklaýyş agyry nokatlaryny çözmegi we gymmaty döretmegi ýüregine düwýär. Kubao seriýaly önümler Hagridiň esasy bäsdeşlik ukyby bolup, önümiň hilini, durnuklylygyny we öndürijiligini yzygiderli ýokarlandyrmak Hagridiň müşderilere tutanýerliligi we ygrarlylygydyr. Win-win hyzmatdaşlygy düşünjesine eýerip, hagris logistika kärhanalarynyň köpüsiniň müşderiler üçin gymmatlyk döretmek üçin biziň bilen elleşmegini garşy alýar.
Iş wagty: Iýun-29-2022