


Soňky ýyllarda logistika pudagynyň çalt ösmegi bilen elektrik, azyk, derman we sowuk zynjyr ýaly pudaklarda, esasanam sowuk zynjyryň logistika ssenarilerinde dört taraplaýyn gatnaw awtoulaglary giňden ulanyldy. Häzirki wagtda enjam -20--25 ranging aralygynda, esasanam -18 below-dan aşakdaky sowuk zynjyr ulgamlarynda işlemek ukybyna eýedir. Saklamak üçin dört taraplaýyn gatnaw awtoulaglarynyň ulanylmagy giňişligiň ulanylyşyny ep-esli gowulaşdyryp biler we iş ýerleriniň gurşawyny ep-esli gowulaşdyryp, işçileriň işini has amatly edip biler. Programmanyň esasy doly ssenariýasy, käbir pudaklarda esasy gurşaw gazanyldy. Highokary çeýeligi bolan, esasanam tertipsiz ammar ýerleşişi, ýokary dykyzlykly ammar, şeýle hem has köp önüm spesifikasiýasy we az partiýa bilen iş rejeleri üçin amatly X-ok we Y ok materiallaryny dolandyrmak ukybyna eýedir.

Standartlaşdyrylan önüm hökmünde dört taraplaýyn gatnaw görnüşi biri-biri bilen çalşyrylyp bilner we islendik dört taraplaýyn ulag kynçylykly dört taraply ulagyň wezipesini ýerine ýetirip biler. Dört taraplaýyn ulaglaryň sany tekjelerdäki geçelgäniň çuňlugy, ýüküň umumy mukdary we giriş-çykyş amallarynyň ýygylygy ýaly faktorlaryň utgaşmasy bilen kesgitlenýär. Ontologiýa dizaýnynyň yzygiderli kämilleşdirilmegi bilen paletler üçin dört taraplaýyn gatnaw awtoulagy kem-kemden akylly işleýän robota öwrüldi. Işleýiş netijeliligi we çeýeligi ep-esli gowulaşdy we ulanylyşy indi harytlary tekjelerde saklamak bilen çäklenmeýär. Ammarlary işlemek we ýygnamak ýaly ssenariýalarda ulanylyp bilner, bu ulgam meýilnamalaşdyrmagyň kynlygyny şübhesiz ýokarlandyrýar.

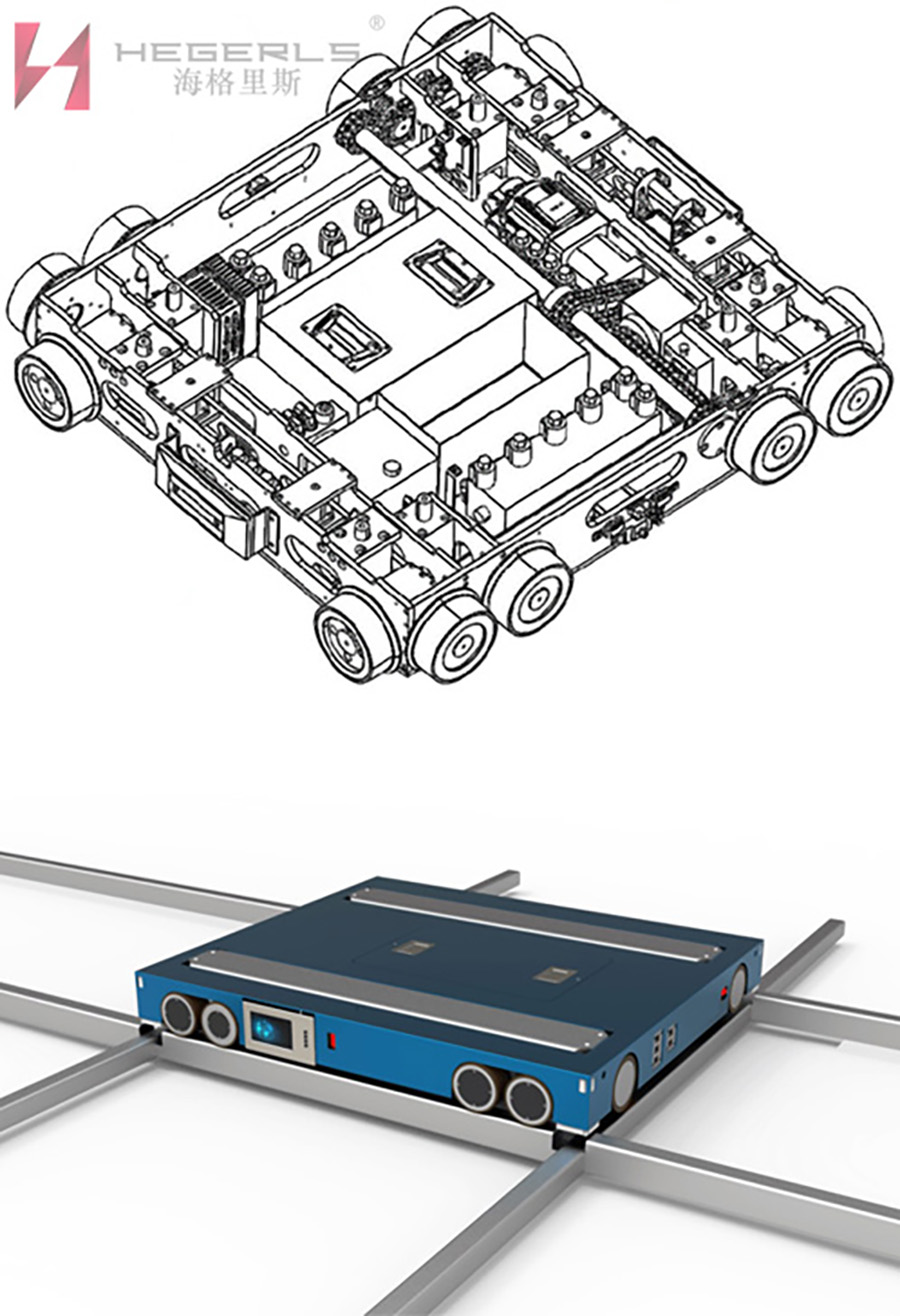
Sowuk saklaýyş seriýasy HEGERLS tarapyndan işe girizilen dört taraplaýyn gatnaw awtoulagy ýeňil dizaýny kabul edýär, mehaniki gurluşy optimallaşdyrýar we ulagyň umumy dizaýnynda elektrik bölekleri üçin pes temperatura gorag dizaýnyny goşýar. Elektron dolandyryş we esasy komponentleriň hemmesi birinji derejeli marka pes temperaturaly öýjüklerden, pes temperaturaly import edilýän PLC-lerden we elektrik ulgamlaryndan ýasalýar; Ulgamyň durnuklylygyny üpjün etmek üçin dört taraplaýyn gatnaw awtoulagy we sowuk zynjyr göteriji zawoddan çykmazdan ozal zawodyň ýokary we pes temperatura çyglylygy barlaghanasynda 3 * 24 sagatlyk synag synagyndan geçýär we esasy komponentleri 7 * 24 geçýär - funksional synag. “Hagrid HEGERLS” lýuboý görnüşli dört taraplaýyn gatnaw ulgamy hem ýük giňişligini dolandyrmagyň (WMS) we enjamlary meýilleşdirmek ukybynyň (WCS) giňişleýin derejesine eýe. Bu programma üpjünçiligi adaty AS / RS-den düýpgöter tapawutlanmaýar, ýöne tapawut AS / RS-de ýok gatnaw ulaglary üçin meýilnama ulgamy. Umumy ulgamyň durnukly we netijeli işlemegini üpjün edip bilerler. Işleýän wagtynda lýubo görnüşli dört taraplaýyn gatnaw awtoulagyna we lifte garaşmazlyk üçin, lift bilen tekjeleriň arasynda keş keş konweýer liniýasy döredildi. Gatnaşyk görnüşli dört taraplaýyn gatnaw awtoulagy we lifti geçiriş amallary üçin keşleri konweýer liniýasyna tabşyrýar we şeýlelik bilen işiň netijeliligini ýokarlandyrýar.
HEGERLS sowuk saklaýyş lýubkasy dört taraplaýyn gatnaw, WCS ammar dolandyryş ulgamyny we WMS ammar dolandyryş ulgamyny üznüksiz birleşdirip, 0 ~ -25 the temperatura aralygynda hem işläp biler. WMS-den tabşyryk görkezmelerini alandan soň, harytlaryň saklanyş ýagdaýyna görä AI algoritm optimizasiýasy amala aşyrylyp bilner, saklanylýan ýeri we ýoly paýlamak optimizasiýasyna ýetmek üçin amatly ýer we gatnaw ýoly meýilleşdirilip bilner. Ulag traýektoriýalaryna, inwentar ýagdaýyna we harytlaryň beýleki maglumatlaryna hakyky wagtda tomaşa etmek harytlaryň hakyky we hakyky ýagdaýyna has gowy düşünip biler, wizual ammar dolandyryşyny gazanyp biler we kärhanalara harytlaryň saklanyş ýagdaýyna has gowy düşünmäge kömek edip biler.

Akylly logistika önümleriniň we çözgütleriniň täze nesli üpjün ediji hökmünde AI ýerli algoritm mümkinçiliklerine we robotlar üçin bir nokatly platforma esaslanýan Hebei Woke Hegerls Robotics, müşderiler üçin netijeli we akylly ammar we logistika çözgütlerini üpjün edip, önümçilik ölçeglerini döretmegi dowam etdirýär. azyk we içgi sowuk zynjyry, şol sanda birnäçe kärhanany. Adaty bir ýagdaý:
1) Belli bir Zhuhai kärhanasynyň akylly dykyz sowuk ammary
Esasy enjam, dört taraplaýyn awtoulag we göteriji Hegerls sowuk saklaýyş wersiýasy.
Taslamanyň esasy pursatlary: Sowuk ammar 18 metr beýikdir, iň pes temperatura -18 ℃ we 7000-den gowrak ammar ýerleşýär. Staker kranlary bilen deňeşdirilende, elektrik energiýasynyň sarp edilişiniň 35% -ini tygşytlaýar we 25% -den ýokary saklaýyş kuwwatyna eýe. Çeýe we dürli harytlar üçin üçünji tarap logistika we ammar hyzmat üpjün edijileriniň saklamak zerurlyklaryny kanagatlandyrýar.
2) Sinszýan şeker senagatynyň belli bir kärhanasynyň dört taraplaýyn ulag saklaýyş desgasy
Esasy enjamlar: “Hegerls” dört taraplaýyn ulag + göteriji + robot goluny paletizasiýa edýär.
Taslamanyň esasy pursatlary: 22 metr beýiklikde we 26000-den gowrak ammarda 40000 tonna taýýar şeker saklap bilýär. Bu akylly intensiw kitaphana kärhananyň täze nesil akylly önümçilik görkeziş önümçilik bazasyny döretmeginiň möhüm bölegi bolup durýar.
3) Belli bir Guangdong kärhanasynyň önümçilik zawody
Esasy enjamlar: HEGERLSAMR roboty (akylly işleýiş ulgamy).
Taslamanyň esasy pursatlary: Her AMR saýtda gözegçilik etmegiň zerurlygy bolmazdan birbada ýüzlerçe kilogram haryt göterip biler. Özüne zarýad berer we hatda gara çyralaryň aşagynda hem işläp biler. Materiallary awtomatlaşdyrmagy we akylly işlemegi, materiallaryň öz wagtynda we takyk işlemegine ýetdi; Päsgelçiliklerden awtomatiki usulda gaça durmak, seminardaky howpsuzlyk töwekgelçiligini ep-esli azaldar; Hasam sanly dolandyryşa ýetildi.
Hebei Woke Metal Products Co., Ltd., içerki we daşary ýurtlarda akylly sowuk zynjyr ammaryna bolan islege üns bermegini dowam etdirýär, akylly önümleri ösdürmäge we öndürmäge, öz tehnologiki gözleglerini we ösüş mümkinçiliklerini yzygiderli güýçlendirýär we has netijeli gözleýär. sowuk zynjyryň bahasyny emele getirmegiň ýollary. Geljekki ösüş ýolunda Hebei Woke içerki we halkara sowuk zynjyrly akylly ammarlara tehniki goldawyny has-da ýokarlandyryp, müşderilere “akylly logistika” nukdaýnazaryndan güýç berer we gymmatlyk döreder diýip pikir edýärin.
Iş wagty: 14-2023-nji dekabry