


Ammar we logistikanyň esasy baglanyşyklarynda, akylly işlemek, saýlamak, sortlamak we ş.m. köp zerurlyklary kanagatlandyrýan guty saklaýan robotlar tapawutlanýar. Guty saklaýan robot tekjeleri däl-de, gaplary saýlaýandygy we işleýändigi sebäpli tekjeleriň arasyndaky zolaklary has dar edip bolýar, ammar dykyzlygy has ýokary, boş ýer tygşytlanýar we ammar kärendesi tygşytlanýar; Onuň "adama konteýner" aýratynlygy, gurlan ammarlaryň köpüsi üçin has amatly, üýtgemekde az kynçylyk çekýär we has çeýeligi we sazlaşykly bolýar. Guty saklaýan robot işleýşiniň obýekti tekjeden has kiçi birlik material gutusy, şonuň üçin has köp dürli SKU-laryň ösüş tendensiýasyna we has takyk logistika amallaryna laýyk gelýär. Soňky ýyllarda elektron söwda logistikasynda we dükan paýlanyşynda, önümçilikde, bulut ammarynda we başga-da köp senariýada ulanyldy. 2020-nji ýylda guty saklaýan robotlar esasy ammar we logistika enjamlaryny öndürijileriň ösüşinde gyzgyn nokada öwrüldi we täzeçillik we imitasiýa tolkuny artýar.

Hagris Kubo roboty
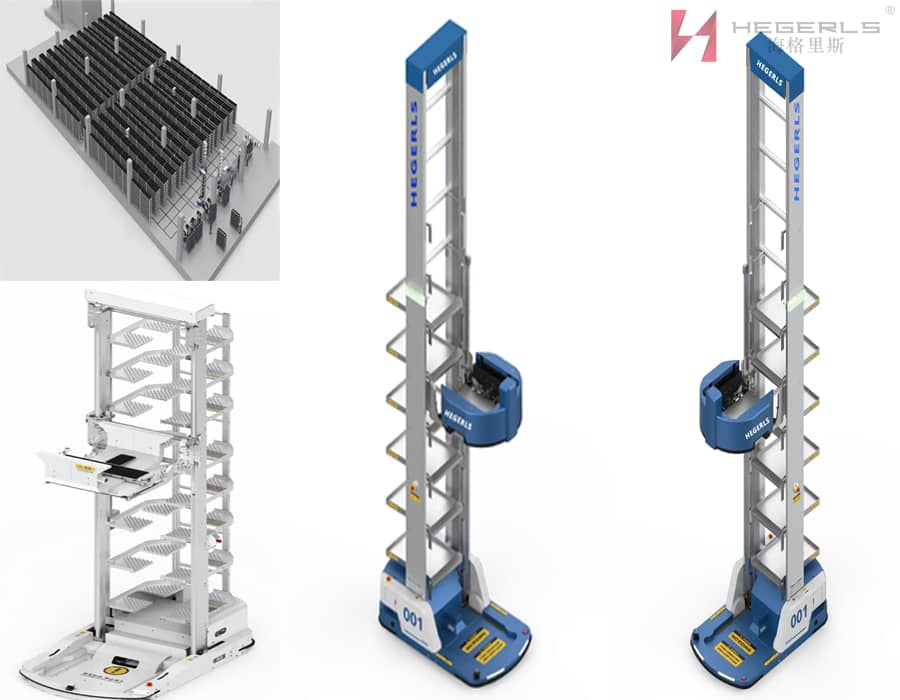
Gegerleriň "adama konteýner" robot kubao işlenip düzüldi we synagdan geçirildi. Robot sargyt talaplaryna laýyklykda degişli harytlary takyk tapyp biler. Шул we lazer slam köp gatly bin robot hegerleri A42 slam, guty saklaýan robotlaryň dürli amaly ssenarilerini kem-kemden öz içine alýar. Şunuň bilen baglylykda, bu gün dinamiki giňligi sazlaýan guty robot hegerls a42-fw hakda gürleşeris.
Dinamiki giňligi sazlaýan guty görnüşli robot Hegerls a42-fw, dürli ululykdaky gutular üçin saýlama we işleýiş işini üpjün etmek üçin çeňňegiň giňligini dinamiki sazlamak üçin dinamiki giňligi sazlamak çeňňek tehnologiýasyny kabul edýär. Güýçli AI hasaplaýyş güýjüne esaslanýan haiq akylly dolandyryş platformasy bilen, robot gutynyň ululygyna görä iň amatly ýer ýerini awtomatiki paýlap biler, ammar ýerleriniň arasynda iň az boşlugy üpjün edip biler we ammar ammaryny has köp ulanyp biler. Gegerls a42-fw, iri kärhanalarda ulanylaly bäri kesgitlenen çeňňek robot bilen deňeşdirilende 20% töweregi saklanýan gaplaryň sanyny artdyryp biler.

Gegerleriň a42-fw dinamiki giňligi sazlaýjy guty robotynyň aýratynlyklary
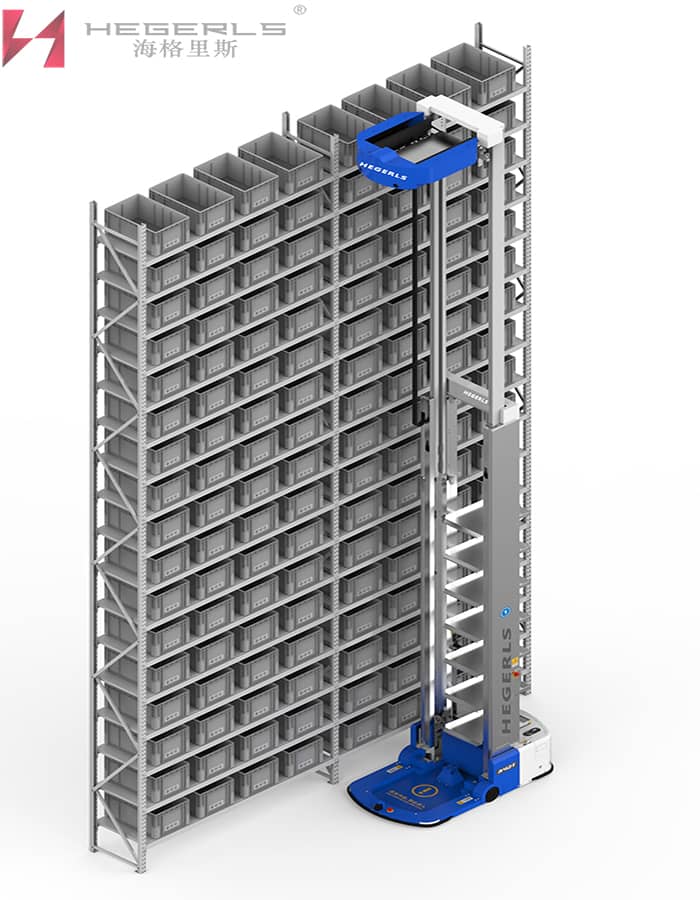
Kubao hegerls a42-fw dinamiki giňligi sazlamak gutusy roboty dinamiki giňligi sazlamak wilkasynyň tehnologiýasyny özbaşdak ösdürýär, gutynyň ululygyna görä çeňňegiň ululygyny sazlaýar we dürli ululykdaky kartonlary / gaplary saýlamaga we işlemäge düşünýär. Täze akylly logistika işleýiş enjamy hökmünde, a42-fw hegerler hiç bir yzarlaýyş enjamynyň kömegi bilen ammarda akylly ýöremegi amala aşyryp biler we awtonom nawigasiýa, işjeň päsgelçiliklerden gaça durmak we awtomatiki zarýad bermek funksiýalaryna eýe. Adaty AGV "tekjä adama" çözgüdi bilen deňeşdirilende, granular saýlaýan kubao roboty has kiçi. Ulgam tarapyndan berlen sargyt talaplaryna laýyklykda, adaty "haryt gözleýän adamlardan" täsirli we ýönekeý "harytlardan adama" akylly seçip alyş tertibine öwrülmegi hakykatdanam amala aşyrylýar. Staker we awtomatiki üç ölçegli ammaryň çözgütleri bilen deňeşdirilende, kubao robot ulgamy umumy ýerleşdiriş bahasy pes we has çeýeligi bilen netijeli ýerleşdirmegi amala aşyryp biler; Şol bir wagtyň özünde, a42-fw hegerler tekjeler, konweýer liniýalary, mehaniki gollar, köp funksiýaly iş stansiýalary we ş.m. ýaly dürli logistika enjamlarynyň dokalmagyny goldaýar. ammar amallary, ammar dykyzlygyny optimallaşdyrýar we ammar pudagynyň awtomatlaşdyrylyşyny we akylly üýtgemegini amala aşyrýar. Ulanylýan ssenariýa: aýakgap we egin-eşik, elektron söwda we ş.m. ýaly karton / material guty garyşyk ammaryň amaly senarisi ýaly köp ölçegli gaplaryň garyşyk saklanyş ssenarisi üçin amatly.


Dinamiki giňligi sazlaýan guty robot hegerleri a42-fw
Dinamiki giňeldilen wilka
Dinamiki giňligi sazlaýan guty roboty bolan Hegerls a42-fw, köp ölçegli gaplara we kartonlara akyl taýdan uýgunlaşmak üçin çatryklary sazlap biler;
Dinamiki ýerleşiş
Dinamiki giňligi sazlaýan guty roboty bolan Hegerls a42-fw, amatly ammar ýagdaýyna akyl taýdan laýyk gelmek üçin vilkalaryň giňligini dinamiki sazlamak üçin hai algoritmini kabul edýär;
Bedeniň ini 900mm
A42-fw dinamiki giňligi sazlaýjy guty robot hegerleriniň giňligi adatça 900mm, ýoluň ini 1000 mm-e çenli dar;
Tekst gatlagynyň aralygy
A42-fw dinamiki giňligi sazlaýan guty robot hegerleriniň tekjeleriniň arasyndaky aralyk iň bolmanda 250 mm çenli azaldylyp bilner. Bu ýerdäki aralyk, kod bar bolanda, kod ýok wagty 300 mm çenli peseldilip bilinjekdigini aňladýar;
Kuwwat sarp ediş senarisi
Dinamiki giňligi sazlaýan guty görnüşli robot Hegerls a42-fw, uly we orta göwrümli mahabatyň gyssagly energiýa sarp ediş ssenarilerini kanagatlandyrmak üçin 10s çalt güýç alyş-çalyş re modeimini kabul edýär;
beýikligi
Bu ýerde almagyň beýikligi görkezilýär. A42-fw dinamiki giňligi sazlaýjy guty robot hegerleriniň iň pes alma beýikligi 190mm;
3D wideo tehnologiýasy
Hegerls a42-fw, dinamiki giňligi sazlaýan guty görnüşli robot, harytlary almak we ýerleşdirmek üçin kod erkin kesgitlemäni kabul edýär we ösen 3D wizual tanamak tehnologiýasyny ulanýar.

Hagerls - gelejek hakda
Aslynda, gutulary saklaýan robotlaryň dizaýnyndan we önümçiliginden ýa-da iri kärhanalar tarapyndan guty saklaýan robotlaryň ulanylmagyndan bolsun, guty saklaýan robot tehnologiýasynyň ägirt uly ösüş perspektiwalary bar:
Wizual AI tehnologiýasynyň kömegi bilen robot maksatly material gutusynyň ýagdaýyny we beýikligini takyk kesgitläp biler we material gutusyny kodsyz takyk saýlamagy we ýerleşdirilmegini amala aşyryp biler. Mundan başga-da, dürli ammar we logistika enjamlary, şol sanda rolik, tekje, gizlin AGV, emeli iş stansiýasy we has giň funksiýalara eýe bolan beýleki iş platformalary bilen çeýe baglanyşyp biler; Pathol nawigasiýasy nukdaýnazaryndan, guty saklaýan robot adaty iki ölçegli kod nawigasiýasyndan wizual slam nawigasiýasyna, soňra bolsa lazer slam nawigasiýasyna çenli ösdi. Daşarky önümleri we daşky gurşaw baradaky maglumatlary netijeli alyp bilýän, päsgelçiliklerden awtomatiki usulda peýdalanyp we has çylşyrymly we üýtgäp bilýän ammar iş gurşawyna uýgunlaşyp bilýän tehnologiýa barha ösýär; Asyl gap robotynyň diňe bir binasy bardy we ýygnamagyň netijeliligi pesdi. Gegerls, hegris tarapyndan işlenip düzülen guty saklaýan robotdan, bir wagtyň özünde birnäçe maksatly gaplary ýygnap bilýän, has az ýygylygy saýlamagy we az robot bilen işlemegi amala aşyryp bilýän we iş netijeliligini we saklanyşyny ep-esli ýokarlandyryp bilýän köp sanly bufer pozisiýasy bolan robot döredildi. dykyzlygy.
Iş wagty: Iýul-04-2022