


Mälim bolşy ýaly, ammar amallary esasan saklamak, daşamak, sortlamak we daşamak bilen baglanyşyklydyr. Logistika amallarynyň diwersifikasiýasy we çylşyrymlylygy bilen dört taraplaýyn gatnaw ulaglary, täze saklaýyş tehnologiýasy hökmünde çeýeligi we beýleki aýratynlyklary sebäpli ünsi özüne çekdi. Dört taraplaýyn gatnawy üstünlikli ösdürmegiň esasynda Hebei Woke keseligine önüm öndürdi. Häzirki wagtda Hebei Woke, bir / goşa çuňlugyň görnüşleri, gysgyç görnüşli teleskopik çatryklar we ýörite senagat işiniň zerurlyklaryny kanagatlandyrmak üçin goşmaça statiki garşy awtoulaglar ýaly dürli gatnaw modelleriniň sanyny döretdi.
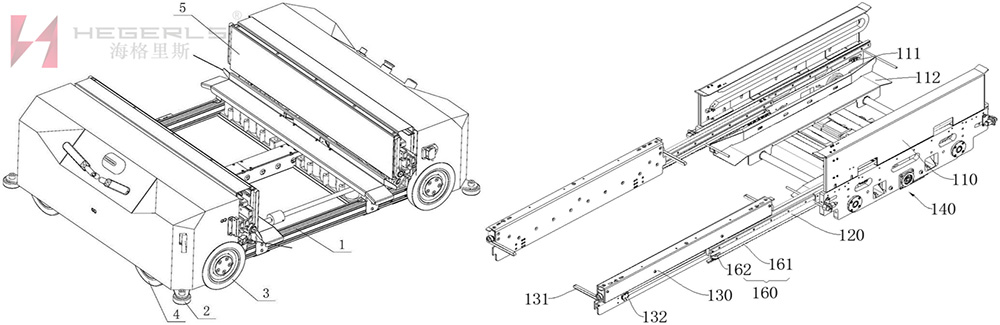
Dört taraplaýyn HEGERLS gatnawy, awtonom meýilnamalaşdyrmakda, ýoly optimizirlemekde, ulgamyň netijeliliginde, giňişlik çäklendirmelerinde we konteýner stakerleri we köp gatlakly çyzykly gatnawlar, konteýner giriş ulgamlarynyň beýleki taraplaryndaky bökdençlikleri ýeňip geçýän innowasion logistika robot önümidir. Akylly konteýnerlere giriş çözgütleri babatynda Hebei Woke-nyň öňdebaryjy orny üçin esas. Gripper görnüşli dört taraplaýyn gatnaw, ykjam ulgam dizaýnyna we gaty ýokary saklaýyş dykyzlygyna eýe bolan Hebei Woke HEGERLS-iň täze önümidir. Harytlary kesgitläninden we ýerleşdireninden soň, dört taraplaýyn gysgyçly HEGERLS, tutulýan harytlaryň ululygyna görä awtomatiki sazlamak üçin öz gysýan teleskopik wilkasyny ulanyp biler. Çalt işlemek, durnukly işlemek we ýükleri netijeli ýüklemek aýratynlyklary bar. Dört taraplaýyn gysgyçly HEGERLS, material gutusyny takyk kesgitläp we tapyp bilýän harytlary ýygnamak üçin usuly ulanýar. Teleskopik çeňňek material gutusynyň ululyk aýratynlyklaryna awtomatiki sazlanýar we uýgunlaşýar we material gutusyny gysmak we saklamak üçin gönüden-göni uzalýar, material gutusyna girmek we gatlak üýtgetmek amallaryna çalt we takyk ýetýär. Umumy geçirijiligi we iş netijeliligini ýokarlandyrmak, ýokary çeýe we innowasion ammar amallaryny dowam etdirmek üçin ýokary tizlikli liftler we beýleki enjamlar bilen hyzmatdaşlyk ediň. Dört taraplaýyn gysgyçly HEGERLS esasan lukmançylyk pudagy üçin amatly we çeýe teleskopik wilkasy bilen material gutularyň dürli aýratynlyklaryna girip biler.

Dört taraplaýyn gatnawly HEGERLS takyk giriş amallaryny ýerine ýetirip biler, kärhanalara “daşardan iberilýän ulaglary daşaýan awtomatiki ammarlary daşamak” prosesi awtomatlaşdyrmak, maglumat bermek we maglumat bermek, ammarlaryň netijeli ulanylmagyny üpjün etmek. we kärhananyň logistika amal mümkinçiliklerini gowulandyrmak. Häzirki wagtda Hytaýda birnäçe lukmançylyk kärhanalary bilen hyzmatdaşlyk etdik we geljekde lukmançylyk ammaryna isleg artar. Dört taraplaýyn “HEGERLS” gatnawy, lukmançylyk pudagyndaky müşderilere has köp mümkinçilik berýär, şeýle hem Hytaýda lukmançylyk gaplaryny saklamakdaky boşlugy doldurýar. Bu önümiň ulanylmagy diňe bir kärhananyň ykdysady peýdalaryny gowulaşdyrmak bilen çäklenmän, tutuş logistika pudagynda “akylly ammar” gurulmagyna hem uly itergi berýär.

“HEGERLS” gripper görnüşli dört taraplaýyn gatnaw awtoulagy “adama ýük” çözgüdi adaty iş usullary bilen deňeşdirilende bäş sany artykmaçlyga eýe:
Bularyň biri kosmosdan peýdalanmagyň netijeliligini ýokarlandyrmakdyr
Şol bir saýt şertlerinde, bir meýdanda saklaýyş kuwwaty giňelýär we tekjeleriň beýikligine çenli uzalýar we sahypa giňişliginden has gowy peýdalanýar;
Ikinjiden, öý işiniň netijeliligini we takyklygyny ýokarlandyryň
HEGERLS-iň dört taraplaýyn gatnawyny saklaýan “adamlara harytlar” ammar çözgüdi rejesi, seçip almagyň netijeliligini ep-esli ýokarlandyrýar we sagatda 1000 bölege ýetýär. Şol bir wagtyň özünde, WMS we WCS-iň hyzmatdaşlygy bilen tutuş ammar tertibi tertipli dolandyrylýar, amallaryň takyklygyny ep-esli ýokarlandyrýar;
Üçünjiden, işçi güýjüni azaltmak we amallary has ygtybarly etmek
El bilen elýeterlilik re modeimi bilen deňeşdirilende, dört taraplaýyn gysgyçly HEGERLS, iş stansiýasy ýa-da seçip alýan robot bilen enjamlaşdyrylandyr, bu bolsa zähmeti 50% -den gowrak azaldyp biler;
Dördünji: Göwrüm
Hebei Woke-nyň dört taraplaýyn gatnaw tehnologiýasy ulgamy, iň az gatnaw belgileri bilen hasaplamalar arkaly pes akymly ssenariýalarda materiallaryň girmegini we çykmagyny awtomatlaşdyrmaga mümkinçilik berýär;
Bäşinji: Doly ölçegli materiallar üçin amatly
“Hebei Woke” dört taraplaýyn gatnaw tehnologiýasy, bazaryň dürli zerurlyklaryny kanagatlandyrmak üçin ulgamyň çeýeligini ep-esli ýokarlandyryp, doly göwrümli materiallary öz içine alyp bilýän özboluşly armatura dizaýnyna eýedir.

Hebei Woke HEGERLS gatnaw awtoulaglaryny esasy önümi hökmünde alýar we akylly gatnaw awtoulaglary, dört taraplaýyn gatnaw awtoulaglary, iki taraplaýyn gatnaw awtoulaglary, esasy awtoulaglar, stakerler, gatnaw awtoulag liftleri, material guty liftleri, tekjeler, giriş bilen akylly gatnaw awtoulag çözgütlerini gurýar. we daşaýyş enjamlary we ammar dolandyryş ulgamy programma üpjünçiligi. Kärhanalaryň amatly inwentarlary saklamagyny we ammarlary gaýtadan işlemegiň mümkinçiliklerini gowulandyrmagyny üpjün etmek üçin has ýokary saklaýyş netijeliligi we möhüm çykdajy artykmaçlyklary bar. Hebei Woke HEGERLS, dürli pudaklarda müşderileriň isleglerine esaslanyp, dürli ammar çözgütlerini berip biler. Diňe ammaryň ulanylyşyny gowulandyrmak bilen çäklenmän, ammar ulgamynyň işleýiş durnuklylygyny hem ýokarlandyryp biler. Häzirki wagtda “Hebei Woke HEGERLS” -iň iş gerimi ulagly üç ölçegli ammar çözgütlerini, ammar integrasiýa çözgütlerini, iberiş we sortlaşdyryş çözgütlerini, şeýle hem AGV toplumlaýyn ammar çözgütlerini we ş.m. Hebei Woke HEGERLS R&D önüm garnituralary, halkara amal standartlaryna esaslanyp müşderilerimiz üçin iň ýokary bahany döretmäge dowam eder.
Iş wagty: Iýun-07-2023