


Döwrebap akylly ammar dolandyryş ulgamynyň esasy serişdesi hökmünde doly awtomatiki logistika roboty gije-gündiziň dowamynda her dürli transport işini amala aşyryp biler, bu bolsa artykmaç zähmet we howpsuzlyk töwekgelçiligini ep-esli azaldar. Netijede täze döwrebap akylly ammar dolandyryş ulgamy döredildi. Indi, akylly ulgam amalynyň ammar, ammar logistikasy, gaplamak we ekspress sortlaşdyrmagyň ähli basgançaklarynda tamamlanmagyny, obýektleriň yzarlanyşyny we wizual dolandyryşyny tamamlamagy we ammar ýerini tygşytly peýdalanmagyny üpjün edip biler. Indi RGV gatnawy çalt işleýär we ýokary saklaýyş dykyzlygyna eýe. Diňe logistika netijeliligini we giňişlik ulanylyşyny gowulandyryp bilmän, işçi güýjüni we ammar ýerini hem tygşytlap biler. Çeýe we giňeltmek aňsat. Şol faktorlar sebäpli RGV gatnawy köp pudaklarda makullandy we has giňden ulanylýar.
Demir ýol RGV gatnawy: demir ýol görkeziji ulag (RGV) akylly robot. RGV gatnawynyň gaýtadan dikeldilmegi ýörelgesi, palet enjamyny ulag tekjesiniň geçelgesiniň demir ýolunyň öň tarapynda forklift ýa-da staker bilen ýerleşdirmekdir. Radio uzakdan dolandyrmak bilen dolandyrylýan gatnaw awtoulagy, üstünde işleýän palet bölüminiň gollanma demir ýoluny göterýär. Gatnaw awtoulagy tekjäni tekjäniň çuňlugynda süýşürýär we palet tekjäniň öň tarapyna geçýär. Gatnaw awtoulagyny forklift ýa-da staker bilen dürli ýollara ýerleşdirip bolýar we şol bir gatnaw awtoulagyny birnäçe geçelgede ulanyp bolýar. RGV gatnawlarynyň sany ýoluň çuňlugy, ýüküň umumy mukdary we eltiş ýygylygy ýaly giňişleýin faktorlar bilen kesgitlenýär.
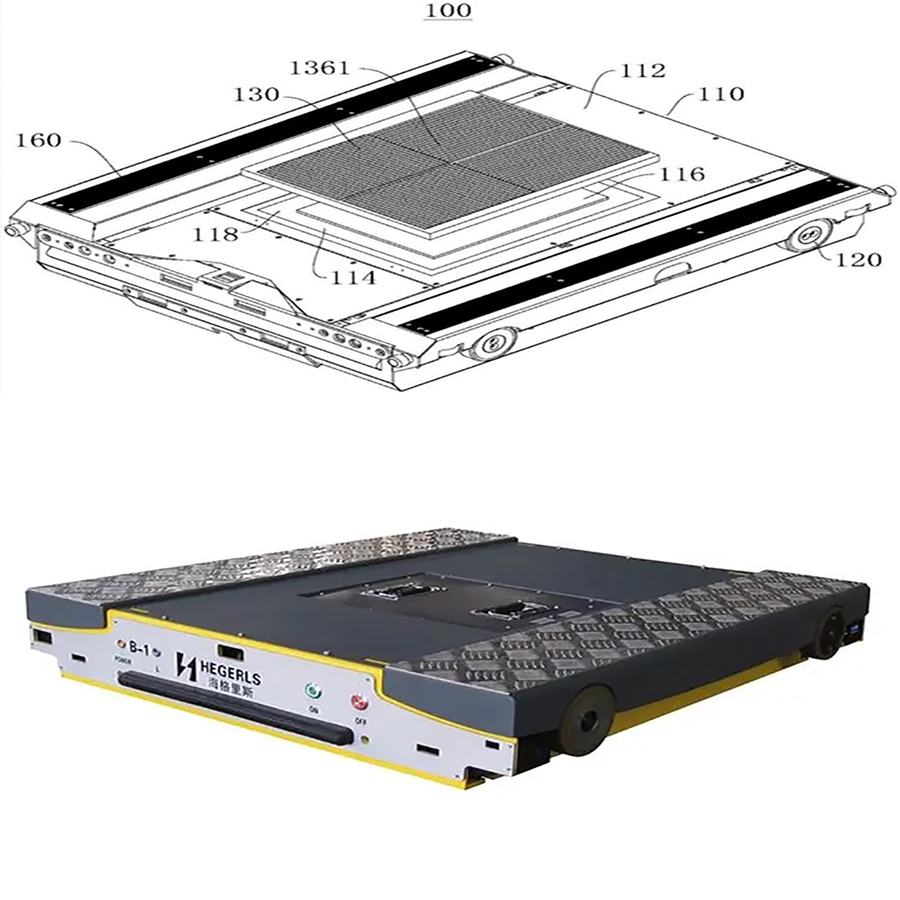
“Hebei hegris hegerls” ammar tekjesini öndüriji, forkliftleri, stakerleri, logistika trolleýslerini, logistika trolleýslerini, awtoulag awtoulaglaryny, göterijileri, stakerleri, akylly daşaýyş we sortlaýyş ulgamlaryny, ammar kapasalaryny we ş.m. ösdürmäge we öwrenmäge ökde hünärmenler we ökde hünärmenler bar. Kompaniýa ösen we doly önümçilik enjamlaryna eýe. Elmydama “hiline, hiline we hyzmatyna ünsi jemlemek” ýörelgesine eýerýär, yzygiderli ösýär we täzelenýär we hünärli we ünsli hünärmen önümçilik üpjün edijisini döredýär. Hercules hegerls ammar tekjesini öndüriji tarapyndan öndürilen süýşýän aragatnaşyk liniýasynyň elektrik ýoly gatnawy göni ýa-da tegelek ýolda hereket edip biler, ýokarky kompýuter ýa-da WMS ulgamy bilen aragatnaşyk gurup biler we RFID, ştrih kody we bilelikde awtomatiki kesgitleme, giriş we beýleki funksiýalary amala aşyryp biler. beýleki kesgitleýiş tehnologiýalary. RGV demirýol gatnaw ulaglary, adatça, ulagyň işleýiş aralygyna baglylykda batareýany, demirýol üpjünçiligini we süýşýän aragatnaşyk liniýasyny ulanýar. Öňünden kesgitlenen ýol demirýolunda işleýän we birnäçe logistika düwünlerini birikdirmek üçin ulanylýan ştrih koduny ýerleşdirmek ýa-da lazer bilen ýerleşdirmek çalt, çeýe, sazlamak üçin ýönekeý we saklamak aňsat. Kodlaýjy, ownuk ýalňyşlyk bilen köp nokatly awtoulag duralgasy üçin gurnalyp bilner. Bu ussahanany gurnamak liniýasyny awtomatlaşdyrmak üçin esasy ammar enjamydyr.
Demir ýol RGV gatnawy: demir ýol görkeziji ulag (RGV) akylly robot. RGV gatnawynyň gaýtadan dikeldilmegi ýörelgesi, palet enjamyny ulag tekjesiniň geçelgesiniň demir ýolunyň öň tarapynda forklift ýa-da staker bilen ýerleşdirmekdir. Radio uzakdan dolandyrmak bilen dolandyrylýan gatnaw awtoulagy, üstünde işleýän palet bölüminiň gollanma demir ýoluny göterýär. Gatnaw awtoulagy tekjäni tekjäniň çuňlugynda süýşürýär we palet tekjäniň öň tarapyna geçýär. Gatnaw awtoulagyny forklift ýa-da staker bilen dürli ýollara ýerleşdirip bolýar we şol bir gatnaw awtoulagyny birnäçe geçelgede ulanyp bolýar. RGV gatnawlarynyň sany ýoluň çuňlugy, ýüküň umumy mukdary we eltiş ýygylygy ýaly giňişleýin faktorlar bilen kesgitlenýär.
“Hebei hegris hegerls” ammar tekjesini öndüriji, forkliftleri, stakerleri, logistika trolleýslerini, logistika trolleýslerini, awtoulag awtoulaglaryny, göterijileri, stakerleri, akylly daşaýyş we sortlaýyş ulgamlaryny, ammar kapasalaryny we ş.m. ösdürmäge we öwrenmäge ökde hünärmenler we ökde hünärmenler bar. Kompaniýa ösen we doly önümçilik enjamlaryna eýe. Elmydama “hiline, hiline we hyzmatyna ünsi jemlemek” ýörelgesine eýerýär, yzygiderli ösýär we täzelenýär we hünärli we ünsli hünärmen önümçilik üpjün edijisini döredýär. Hercules hegerls ammar tekjesini öndüriji tarapyndan öndürilen süýşýän aragatnaşyk liniýasynyň elektrik ýoly gatnawy göni ýa-da tegelek ýolda hereket edip biler, ýokarky kompýuter ýa-da WMS ulgamy bilen aragatnaşyk gurup biler we RFID, ştrih kody we bilelikde awtomatiki kesgitleme, giriş we beýleki funksiýalary amala aşyryp biler. beýleki kesgitleýiş tehnologiýalary. RGV demirýol gatnaw ulaglary, adatça, ulagyň işleýiş aralygyna baglylykda batareýany, demirýol üpjünçiligini we süýşýän aragatnaşyk liniýasyny ulanýar. Öňünden kesgitlenen ýol demirýolunda işleýän we birnäçe logistika düwünlerini birikdirmek üçin ulanylýan ştrih koduny ýerleşdirmek ýa-da lazer bilen ýerleşdirmek çalt, çeýe, sazlamak üçin ýönekeý we saklamak aňsat. Kodlaýjy, ownuk ýalňyşlyk bilen köp nokatly awtoulag duralgasy üçin gurnalyp bilner. Bu ussahanany gurnamak liniýasyny awtomatlaşdyrmak üçin esasy ammar enjamydyr.

[hegris hegerls süýşýän aragatnaşyk liniýasynyň elektrik demir ýol gatnawy barada jikme-jiklikler]
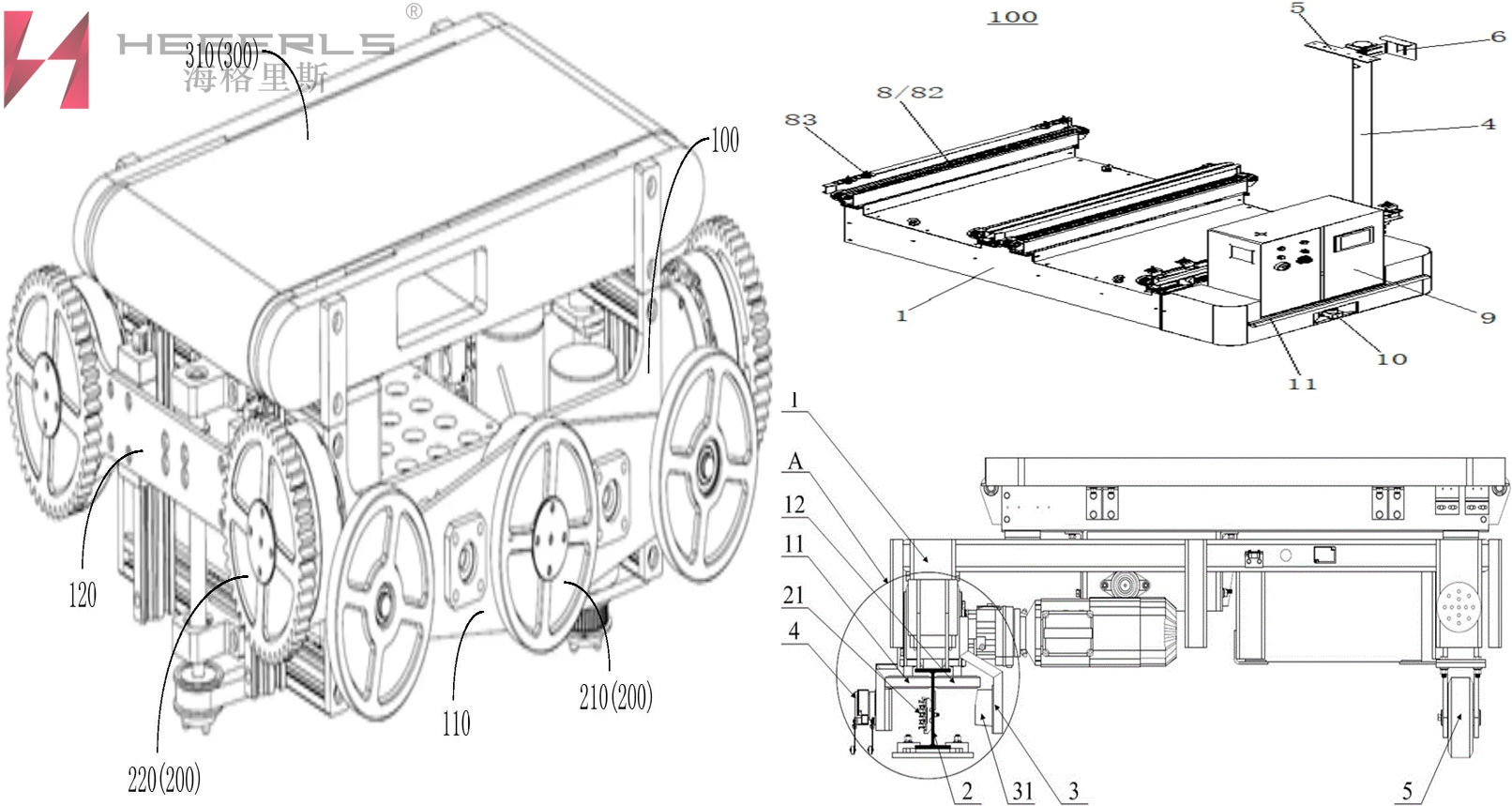
Zarýad beriji: batareýany akyl bilen güýçlendiriň we zarýad berlenden soň awtomatiki duýduryş beriň, bu ýönekeý we işlemek üçin amatly;
Reduktor: ýokary geçirijilik netijeliligi, durnukly işleýşi, pes ses, amatly tehniki hyzmat we ähli derejelerde çeýe aýlanmagy bilen tekiz awtoulag üçin ýörite gaty diş ýüzüni reduktor;
Motor: pes tizlikli we ýokary kuwwatly işlemek, durnukly başlangyç, uly hereketlendiriji güýç, peseldiji ýüküň peselmegi, pes woltly, uzak hyzmat möhleti, kiçi göwrüm we ýeňil agram;
Radar gözlemek: infragyzyl şöhle arkaly ýol şertlerini duýýar. Signal tarapyndaky päsgelçilikleri duýansoň, awtoulag awtomatiki durar;
Elektrik gutusy: tutuş elektrik dolandyryş ulgamy dürli gorag ulgamlary bilen enjamlaşdyrylan, trolleýiň işleýşini we dolandyrylyşyny has ygtybarly we ygtybarly edýär;
Çarçuwaly: guty berkitme gurluşy. Fireangyn bolan ýagdaýynda bejergiden soň çarçuwany deformasiýa etmek aňsat däl we owadan görnüşe eýe;
Tigir: polioksil turşusy bilen örtülen kauçuk tigir, çeýe rul, içindäki guýma polat, güýçli aşaga çydamly we ýük göteriji kuwwaty, ýeri goraýar;
Batareýa: onuň elektrody durnukly naprýa, eniýe, arzan baha, ýönekeý tehniki hyzmat, durnukly hil we ýokary ygtybarlylyk bilen gurşun we gurşun oksidinden durýar;
Simsiz uzakdan dolandyrmak: akylly uzakdan dolandyrmak, aňsat dolandyryş;
Duýduryş çyrasy: operatorlara ýatlatmak üçin üznüksiz eşidilýän we wizual duýduryş.
Pes woltly demirýol üpjünçiligi RGV, demirýol süýşýän aragatnaşyk liniýasy bilen işleýän elektrik trolleýsine 36V bir fazaly pes woltly demir ýol güýjüni bermekdir. Basgançakly transformator bir fazaly AC 380V-ni bir fazaly 36V-e çenli azaldar, ýoluň süýşýän aragatnaşyk liniýasynyň üsti bilen trolleýde iýmitlendirýär we soňra bortdaky düzediji arkaly AC-ni DC-e öwürýär. Motor, programmirläp bolýan gözegçilik ediji, düzediji we ş.m. arkaly öňe, yza, tizlenmek we tizlenmek üçin dolandyrylýar zawod meýdançasyndaky transport ýerleşişini ep-esli ýeňilleşdirýän uzakdan dolandyrmagy we awtomatizasiýany amala aşyrmak. Şeýle-de bolsa, ýol gurluşygynyň talaplary ýokary we ýol izolýasiýasy üpjün edilmelidir. Işleýän aralyk 30 metrden geçende, mis mis çybygynyň simleri bilen goşular. Işleýän aralyk 50 metrden geçende basgançakly transformatorlaryň sany köpelmeli. Trolleýiň polat gurluşy kran ýörelgesine esaslanýar. Bularyň hemmesi polat plitalar bilen kebşirlenen guty berkitme gurluşy. Gutynyň gurluşy, kranyň guty berkitmesi we tekiz awtoulagyň standartyna laýyklykda düzülendir. Amatly tehniki hyzmat, aňsat sökmek, güýçli göterijilik ukyby, uzak ömri we kiçijik stol deformasiýasy. Elbetde, giňden ulanylýar, şonuň üçin bahany tapmak üçin köp ulanyjy bolar. “Hegris hegerls” ammar tekjesini öndüriji, ulanyjylaryň isleglerine görä ýeňillikli bahada gepleşik geçirer!
Iş wagty: Iýun-08-2022