


Elektron söwdanyň çalt ösmeginden peýdalanyp, içerde we halkara derejede ammar awtomatizasiýasyna uly isleg bar. Esasanam soňky ýyllarda zähmet çykdajylarynyň ýokarlanmagynyň fonunda, içerki we daşary ýurtdaky dürli iri ammarlar we sortlaýyş merkezleri awtomatlaşdyrylan ammar gurluşygyndaky tagallalaryny artdyrdy. Bu nukdaýnazardan, esasan, dört taraplaýyn gatnaw ulaglary bilen dykyz saklanyşy, giňişligi ulanmagy we çeýe meýilnamalaşdyryp bilýän lýubka esasly çözgütler akylly ammarlarda ýüze çykyp başlady.

Önümçilik kärhanalarynyň nukdaýnazaryndan, fiziki kärhanalar islegiň diwersifikasiýasy, hakyky wagtda sargytlaryň ýerine ýetirilmegi we iş modeliniň çaltlaşdyrylmagy ýaly kynçylyklar bilen ýüzbe-ýüz bolansoň, müşderileriň logistika çözgütlerine bolan islegleri çeýe we akylly bolýar. Bu tendensiýa esaslanyp, Hebei Woke öň pallet bilen işlemek babatynda çeýe çözgütlerdäki boşlugy dolduryp, Hagrid HEGERLS akylly palet dört taraplaýyn gatnawyny ýola goýdy. Häzirki zaman bazarynda palet tekjeleri häzirki zaman senagat ammarlarynda, logistika merkezlerinde, paýlaýyş merkezlerinde we beýleki ssenariýalarda ulanylýan ammar tekjeleriniň iň köp ýaýran görnüşine öwrüldi.

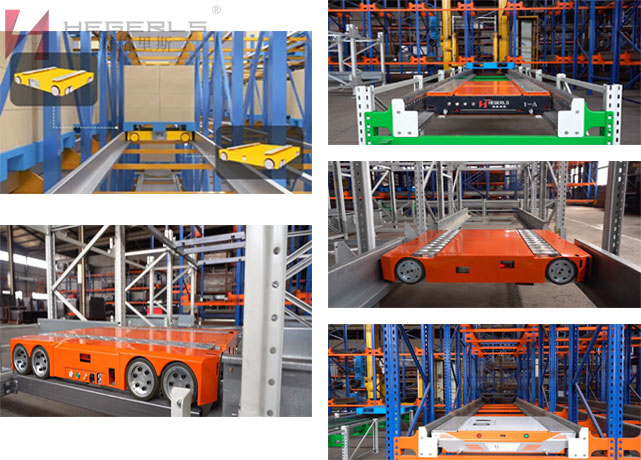
“Hagrid HEGERLS” akylly tarelka dört taraplaýyn gatnaw awtoulagyna dört taraplaýyn gatnaw awtoulagy, ýörite göteriji, tekjeli ulgam, aksesuar ulgamy (zarýad beriş stansiýasy, konweýer, uzakdan dolandyryş, tor we elektrik dolandyryş ulgamy girýär) we a HEGERLS programma üpjünçiligi ulgamy. Köp ulagly meýilnamalaşdyrmak we dört taraplaýyn ulag ulgamynda liftler ýaly degişli enjamlar bilen bilelikde işlemek sebäpli programma üpjünçiligini meýilleşdirmek ukyby ulgamyň netijeliligine gönüden-göni täsir eder. Dört taraplaýyn “Hagrid HEGERLS” akylly tarelkaly alty sany uly artykmaçlygy bar: “ultra inçe”, “ultra çalt”, “ultra howpsuz”, “has uzak çydamlylyk” we “gaty uly göwrümli klaster meýilnamasy”, bu ep-esli gowulaşyp biler. kärhanalaryň önümçilik netijeliligi. Tekjelerde işläp bilýän bu özbaşdak ykjam robot, ammar giňişliginiň ulanylyşyny adaty logistika awtomatlaşdyryş çözgütleri bilen deňeşdirilende 30% ýokarlandyryp biler. Şol bir wagtyň özünde, HEGERLS akylly tarelkaly dört taraplaýyn gatnaw awtoulagynyň göwrümi bary-ýogy 125 millimetr, agramy 300 kilograma we ykjam we berkdir. Şeýle hem, işlemegi has çeýe edip, 1-den 1,5 tonna çenli agramly zatlary dolandyryp biler. 10 tonna saklaýjy bilen deňeşdirilende, elektrik energiýasynyň 50% -den gowragyny tygşytlap biler. Adaty logistika awtomatlaşdyryş çözgütleri bilen deňeşdirilende, çeýe korpus tekjeleriň arasynda gatnaşyp, işleýiş tizligini we saklaýyş dykyzlygyny ýokarlandyryp, sowuk ammar, täze energiýa we beýleki iş ssenarileri üçin has amatly edip biler.

“Hagrid HEGERLS” dört taraplaýyn gatnaw çözgüdi ýönekeý dykyz saklaýyş ulgamy däl, eýsem ýokary çeýe we dinamiki akylly ammar çözgüdi. Esasy artykmaçlygy aýratyn enjamlara paýlanan gözegçilikde. Hut şu aýratynlyk sebäpli ulanyjylar we kärhanalar edil gurluşyk bloklary ýaly çeýe birleşip we ýerleşdirip bilerler. Diňe kesgitli ýollarda işläp bilýän AS / RS stakerlerinden tapawutlylykda, dört taraplaýyn ulag ulgamy näsazlyk ýüze çykan halatynda islendik wagt täze awtoulag bilen çalşyrylyp bilinýän enjam önümi sebäpli standartlaşdyrylýar. Ikinjiden, çeýeligi tutuş ulgamyň “dinamiki ulalmagynda” öz beýanyny tapýar, bu ýerde ulanyjylar we kärhanalar möwsümden daşary we işewür ösüş ýaly üýtgeşmelere görä islendik wagtda dört taraplaýyn ulaglaryň sanyny köpeldip ýa-da azaldyp bilerler we şeýlelik bilen ulgamyň kämilleşmegini üpjün ederler. göterijilik ukyby. Mundan başga-da, aýratyn enjamlar meýilnamalaşdyrmak we algoritmler bilen ýakyndan baglanyşyklydyr, paýlanan dolandyryş bolsa AMR dolandyryş platformasynyň tehnologiýasyna laýyk gelýän her bir ulagda bolýar. HEGERLS-iň meýilnamalaşdyryş strategiýasy diňe bir dört taraplaýyn ulagy dolandyrmak bilen çäklenmän, girýän we çykýan göwrümiň üýtgemegi, transport kuwwatynyň bölünişi, ammaryň ýerleşişini optimizasiýa we ýol optimizasiýasy üçin algoritmleri hem üpjün edip biler. Aýry-aýry enjamlary meýilleşdirmek ýa-da ulgamyň netijeliligini ýokarlandyrmak nukdaýnazaryndan iň uly ýadro ukyby, Hagrid markasynyň önümleriniň artykmaçlygy bolan programma üpjünçiliginden gelýär. Mundan başga-da, dört taraplaýyn “Hagrid HEGERLS” akylly tarelkanyň hem aşakdaky artykmaçlyklary bar:
1) Akyl gözegçiligi
Harytlary saklamagyň we ammar giňişliginden peýdalanmagyň netijeliligini ýokarlandyrmak. WMS we WCS ulgam programma üpjünçiligini kärhana ERP, SAP, MES we beýleki dolandyryş ulgamy programma üpjünçiligi bilen birleşdirmek, harytlaryň ilkinji düzgünini saklap biler we amallarda adam faktorlarynyň bulaşyklygyny ýa-da pes netijeliligini ýok edip biler.
2) Akylly gatlak kommutasiýa
Lift bilen hyzmatdaşlykda gatnaw awtoulagy awtomatiki we takyk gatlagyň üýtgemeginiň netijeli iş tertibine ýetip biler; Spaceeriň üç ölçegli işleýşine göz ýetiriň. Polat tekjäniň çägindäki her ammar ýeriniň girişine we çykmagyna takyk gözegçilik ediň.
3) Locationerleşiş dinamikasyny dolandyrmak
Adaty ammarlar diňe harytlary saklamak üçin ýerlerdir we harytlary goramak olaryň “statiki ammar” görnüşi bolan ýeke-täk wezipesi. Palet dört taraplaýyn gatnaw, ösen awtomatiki ulag enjamy bolup, harytlary diňe zerur maglumatlara görä ammarda saklamaga we saklamaga mümkinçilik bermän, ammaryň daşyndaky önümçilik proseslerine organiki taýdan birikdirilip bilner. Öňdebaryjy logistika ulgamlarynyň döremegine hemaýat beriň we kärhanany dolandyrmagyň derejesini ýokarlandyryň.
4) Saklaýyş ýerleriniň ulanylyşyny netijeli gowulandyrmak
Adaty ammarlaryň saklanyş dykyzlygynyň pesligi, ammaryň umumy meýdanynyň we saklanylýan ýeriniň pes ulanylmagyna getirýär. Palet dört taraplaýyn gatnaw awtoulagy tekjäniň içindäki esasy ýolda dört tarapa hereket edýär we forkliftler we beýleki enjamlar utgaşdyrylmazdan amaly awtomatiki usulda tamamlap biler. Tekstiň esasy ýolunyň göwrümi forklift operasiýa kanalynyň göwrüminden has kiçi bolany sebäpli, palet dört taraplaýyn gatnawy awtomatlaşdyryş ulgamy, adaty ýük awtoulag ýük tekjesi ulgamy bilen deňeşdirilende ammar ýerleriniň ulanylyşyny hasam gowulandyrýar, artyp biler takmynan 20% -den 30% -e çenli, bu adaty ammardan 2-5 esse köp;

“Palet çeýe logistika çözgüdiniň täze nesli” hökmünde HEGERLS programma üpjünçiligi platformasy bilen birleşdirilen HEGERLS akylly palet dört taraplaýyn gatnaw, köp akyl gazanyp we ammaryň saklanýan ýerinden has köp peýdalanyp biler. Mundan başga-da, “Hagrid HEGERLS” akylly palet dört taraplaýyn gatnaw dürli SKU-lara we saklanýan ýerlere görä tertipleşdiriler we algoritm ammarda zatlar saklananda amatly ammar ýerlerini awtomatiki usulda maslahat berer we harytlaryň belli bir düzgünlere laýyklykda saklanmagyna mümkinçilik döreder we soňraky çykyş amallarynda dyknyşykdan gaça durmak, netijeliligi ýokarlandyrmak; Ammardan çykanyňyzda algoritm amatly amatly ýeri maslahat berýär we amatly amatly ýerini üpjün etmek üçin aralyk, wezipelere päsgelçilik we iň soňky inwentar ýaly dürli faktorlary hasaplaýar; Şeýle hem, inwentar wizuallaşdyrmagy gazanyp biler we güýçli uýgunlaşma, ýokary ygtybarlylyk, güýçli ulalmak we ýokary çeýeligi bilen grafiki interfeýs arkaly islendik saklanýan ýeriň ýagdaýyny aňsatlyk bilen görüp biler.
Iş wagty: 26-2023-nji aprel