



Ammar we logistika pudagynyň çalt ösmegi we yzygiderli gaýtalanmagy bilen, bölümlere has köp isleg ýüze çykdy we ammar robotlarynyň netijeliligine has ýokary talaplar öňe sürüldi. Şeýlelik bilen, HEGERLS, “tekjeden adama” seçip alyş meýilnamasyndan “konteýner adama” ammar robot enjamlaryna, ammar robot tekjelerine, ammar robot ammar çözgütlerine we ş.m. bazar talaplaryna laýyklykda önümleri we ammar programmalaryny yzygiderli täzeläp gelýär.
Soňky ýyllarda Hebei Walker Metal Products Co. (Ltd. robot tehnologiýasy we emeli intellekt algoritmleri arkaly awtomatlaşdyryş çözgütleri we her zawod we logistika ammary üçin baha döretmek. Gutujyk saklaýan robot ulgamynyň gözlegine we dizaýnyna ünsi jemläp, robot korpusy, esasy ýerleşiş algoritmi, dolandyryş ulgamy, robot meýilnamasy we akylly saklaýyş dolandyryş ulgamy ýaly esasy elementleriň garaşsyz gözleg we gözleg işleri gazanyldy, ýurtda we daşary ýurtlarda patent düzülişi amala aşyryldy.
HAIPICK dördünji nesile täzelendi. Bu täjirçilik maksatly işlenip düzülen we ulanylýan ilkinji guty görnüşli ammar robot ulgamy. Ammara awtomatiki dolandyrmagy, akylly işlemegi, saýlamagy we tertipleşdirmegi we ýöriteleşdirilen talaplary kabul etmegine kömek edip biler. Häzirki wagtda aýakgap, 3PL, elektron söwda, kuwwat, 3C önümçiligi, lukmançylyk, bölek satuw we beýleki pudaklarda giňden ulanylýan, ýurtda we daşary ýurtda 500 + taslama ulanyldy. Kubao ulgamy bilen müşderiler bir hepdäniň içinde ammar awtomatlaşdyrylyşyny amala aşyryp bilerler, ammar dykyzlygyny 80% - 400% ýokarlandyryp bilerler we işçileriň iş netijeliligini 3-4 esse ýokarlandyryp bilerler.

Recentlyakynda, HEGERLS tarapyndan çykarylan Kubao robotynyň HAIPICK akylly robot çözgüdi, täsirli, ýokary saklaýyş we ýokary durnukly akylly bin robotlary we kiçi, ýeňil, täsirli, çeýe kombinasiýa arkaly “intensiw ammar + harytlary saýlaýan adamlara” has gowy kombinasiýany amala aşyrdy. we tygşytly akylly ulaglary dolandyrýan robotlar, “aşa ýokary girýän we çykýan akymyň” talaby boýunça “SKU-ny saýlamak we sortlamak we köp mukdarda gaýdyp gelmek” pes el bilen işlemegiň netijeliligini agyr çözýär. Bu çözgüdiň täzelikleri, amalylygy we wekilçiligi amaly müşderiler tarapyndan biragyzdan ykrar edildi we makullandy.
Häzirki wagtda HEGERLS tarapyndan çykarylan Kubao robotynyň HAIPICK akylly roboty: HEGERLS A42N karton saýlaýan robot, göteriji HEGERLS A3, goşa çuňlukly robot HEGERLS A42D, teleskopik göteriji bin robot HEGERLS A42T, lazer SLAM köp gatly robot HEGERLS A42M SLAM , köp gatly bin robot HEGERLS A42, dinamiki giňligi sazlaýjy bin robot HEGERLS A42-FW we ş.m.

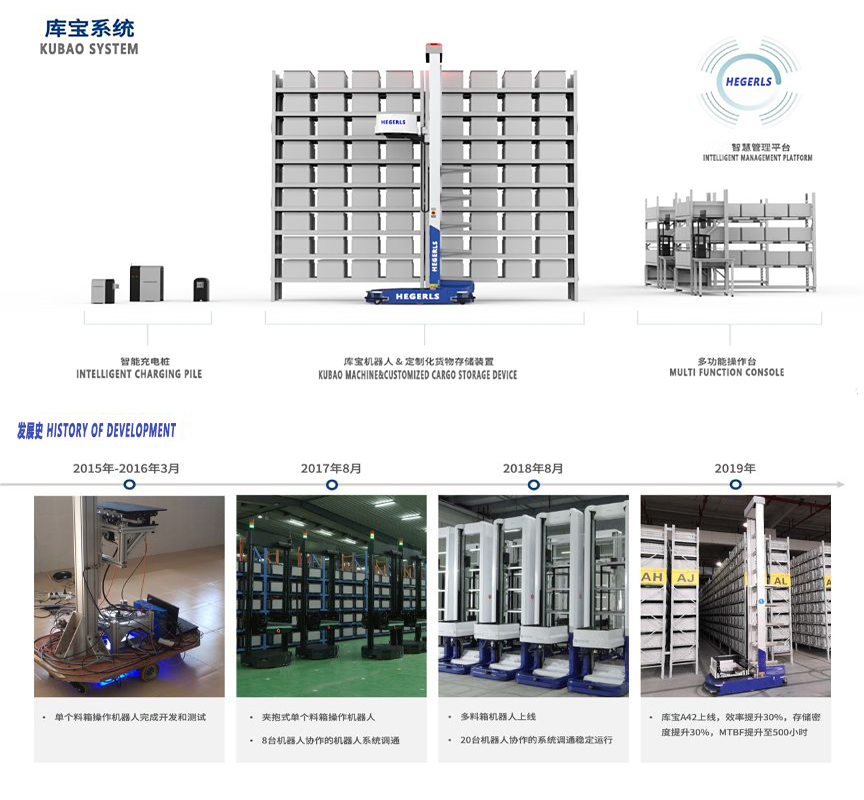
HEGERLS bin robotynyň dizaýn düşünjesi:
“Bin robot + bir gatly keş + ulag bilen işleýän robot” (ýagny, trolleý göterýän “) kombinasiýa tertibi arkaly, sortlamak ýaly“ 3000-10000 bin / sagat gaýtadan işlemek kuwwaty ”ýaly iş ssenariýalarynda pes iş netijeliligi. netijeli çözüldi. HEGERLS bin robot çözgüdiniň esasy pikiri, eseri bölmek we hemme zatdan iň oňat peýdalanmak, ýagny:
»“ Gurluşykda ”jemlenmek üçin ýokary çykdajyly robotlary ulanyň;
»Ultra arzan işleýän robotlar bilen“ hereket edýän kerpiçlere ”üns beriň;
»Müşderilere has az çykdajyly we has amatly ammar çözgütlerini getiriň.

HEGERLS bin robotynyň 5 esasy pursaty:
1) Ulag bilen işleýän robot ykjam dizaýna, ýönekeý we ygtybarly gurluşa, kiçi kanal giňişligine we has çeýe ulgam meýilnamasyna eýe; Bahasy has pes, bu adaty bin robotlarynyň bahasynyň 20% töweregi.
2) Ulag bilen işleýän robot dyrmaşmak ukybyna eýedir, iş gutusyna çykmak üçin material gutusyny göterip biler we seçip almagyň beýikligi takmynan 800mm (beýikligi seçip alyş işine uýgunlaşyp bolýar). Ergonomiki beýiklige laýyk gelýän kesgitli ýagdaýda haryt saýlap biler we amal ýönekeý, täsirli we amatly.
3) Bin roboty dikligine “ýokaryk we aşak ýygnamak we ýerleşdirmek”, ulag trolleýsi bolsa gorizontal ugurda “uzak aralyk daşamak” üçin jogapkärdir. Bin roboty we göteriji trolleý bufer ýagdaýy arkaly biri-birine tabşyrylýar. Iki robot biri-birine täsir etmeýär we ulanmagyň netijeliligini ýokarlandyrýar.
4) rackokarky raf intensiw ammarda, saklanylýan ýeriň birinji gaty bufer giňişliginiň ýarysyna we kanalyň ýarysyna öwrülýär. Boş awtoulag bufer giňişliginden, ýüklenen awtoulag kanaldan geçip biler.
5) hopper robot “ýeke tutmak” re modeimini kabul edýär, aýlanýan mehanizmi ýatyrýar we HEGERLS tarapyndan özbaşdak işlenip düzülen üçünji nesil robot uniwersal şassisini kabul edýär. Umumy gurluşy gaty ýönekeý, bahasy adaty hopper robotynyň takmynan 60% -i, ýöne ýekeje maşynyň netijeliligi 100% ýokarlanýar.

BEG saklaýan robotlardan, iş ýerlerini saýlamakdan we ş.m.-den başga-da, HEGERLS müşderilere IWMS akylly saklaýyş dolandyryş ulgamyny, ESS enjamlaryny meýilnamalaşdyrmak dolandyryş ulgamyny, RCS robot dolandyryş ulgamyny öz içine alýan doly dolandyryş dolandyryş ulgamy - akylly dolandyryş platformasy bilen üpjün edip biler. müşderileriň MES, ERP we beýleki programma üpjünçiligi ulgamlary bilen interfeýs edip biler we Kubao robotlary, senagat mehaniki ýaraglary, pilotsyz forkliftler we beýleki awtomatlaşdyryş enjamlary bilen interfeýs edip biler, Kubao robot ulgamynyň doly toplumyny emele getirip biler.
Iş wagty: Noýabr-01-2022