


Soňky ýyllarda ammar ýerleri barha dartgynlaşýar, ammar ýeri ýeterlik däl, adam çykdajylary ýokarlanýar we kyn iş meselesi barha artýar. Kärhananyň dürli materiallarynyň köpelmegi bilen birlikde, adaty saklaýyş tertibi kärhanalaryň ösüş zerurlyklaryny kanagatlandyrmak kyn boldy. Bu ýagdaýda akylly paletde dört taraplaýyn awtoulaglara esaslanýan palet çözgütleri akylly ammarlarda ýüze çykyp başlady. Indi akylly paletli dört taraplaýyn gatnawyň çözgüdi bazarda giňden ulanylýar. Dört taraplaýyn akylly paletli awtoulag tertipsiz we ýörite görnüşli ammarlarda, uly uzynlygy we ini bolan ammarlarda, ýokary ýa-da kiçi ammar netijeliligi bolan ammarlarda ýa-da kiçi görnüşli we uly partiýaly ammarlarda, köp görnüşli we uly ammarlarda ulanylyp bilner. partiýalar. Highokary çeýeligi we ýokary dykyzlykly tekjeler üçin amatly. Islendik gatnawy amala aşyryp biler. Maýa goýum meýilnamasyna laýyklykda çeýe düzedilip bilner. Specialörite lift bilen birleşdirilip, haryt gatlagynyň üýtgemegine düşünip biler.
Dört taraplaýyn akylly paletli awtoulag, üç ölçegli ammarda harytlary ýygnamak, daşamak we ýerleşdirmek amallaryny ýerine ýetirip bilýän we ýokarky kompýuter ýa-da WMS ulgamy bilen aragatnaşyk gurup bilýän akylly robotdyr. RFID, ştrih koduny kesgitlemek we beýleki logistika maglumat tehnologiýasy bilen bilelikde awtomatiki kesgitleme, ýeke giriş, üznüksiz giriş, awtomatiki usulda we ş.m. funksiýalaryny durmuşa geçirip biler. Akylly palet dört taraplaýyn gatnaw saklaýyş ulgamy, akylly palet dört taraplaýyn gatnawy adaty tekjelere ýokary takyklyk görkeziji relsleri goşup tekjelerden erkin syýahat etmäge mümkinçilik berýär. Gollanma demir ýoly harytlary daşamak we harytlary saklamak funksiýalaryna eýedir, bu ammar ýeriniň ulanylyş tizligini ep-esli ýokarlandyrýar. Awtomatlaşdyrylan üç ölçegli ammarda harytlary saklamak we gözlemek, adaty forklift ýüklemek we düşürmek usuly bilen deňeşdirilende, dört taraplaýyn akylly awtoulag bilen tamamlanandygy sebäpli, zähmet çykdajylaryny we ammar giňişligini ulanmagy ep-esli gowulandyrýar. Akylly dört taraplaýyn gatnaw awtoulagy, belli bir setirde harytlary yzygiderli daşaýan maşyn. Dört taraplaýyn akylly gatnaw güýçli transport kuwwatyna eýedir we uly ýük göterip biler; Geçiriş tizligi birmeňzeş we durnukly bolup, takyk sinhron eltmegi üpjün edip biler; Şol bir wagtyň özünde gurluşy owadan we işleýiş sesi pes. Dört taraplaýyn akylly paletli awtoulag möhüm ammar we logistika ulaglarydyr. Bu iş meýdanyny, önümçilik ýerini we ammar meýdançasyny birleşdirýän kanal we köpri. Highokary derejeli awtomatlaşdyrmagyň, işçi güýjüni we wagty tygşytlamagyň, amatly we çalt işlemegiň, iş netijeliligini ýokarlandyrmagyň we ş.m. artykmaçlyklaryna eýedir. Adatça ýokarky kompýuter bilen birikdirilenden soň akylly saklaýyş intensiw ulgamyny emele getirýär.
Dört taraplaýyn akylly paletiň programma üpjünçiligini meýilleşdirmek esasy zat
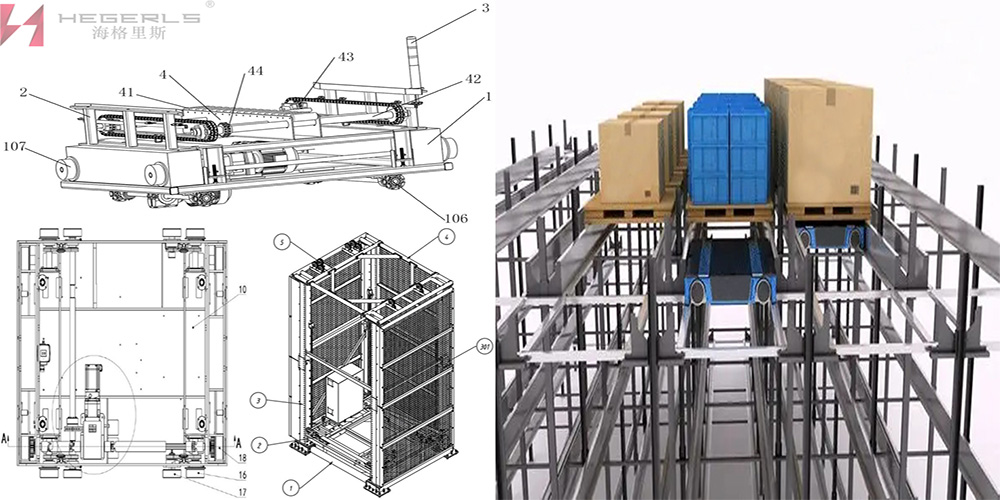
Gegerleri saklamak çözgüdiniň möhüm bölegi hökmünde akylly palet dört taraplaýyn gatnaw awtoulag ulgamy dört taraplaýyn gatnaw awtoulagyny, ýörite lifti, tekjäni, aksesuar ulgamyny (zarýad beriş stansiýasy, konweýer, uzakdan dolandyryjy, tor, elektrik dolandyryş ulgamy) we hegerls programma üpjünçiligi ulgamy. Palet dört taraplaýyn ulag ulgamy köp ulagy meýilleşdirmegi we göteriji ýaly degişli enjamlar bilen bilelikde işlemegi öz içine alýandygy sebäpli, programma üpjünçiligini meýilleşdirmek ukyby ulgamyň netijeliligine gönüden-göni täsir eder.
Palet dört taraplaýyn ulagyň çözgüdi ýönekeý dykyz saklaýyş ulgamy däl, eýsem ýokary çeýe we dinamiki akylly saklaýyş çözgüdi. Esasy artykmaçlygy aýratyn enjamlar + paýlanan dolandyryş, bu müşderileriň dört taraplaýyn ulaglaryň sanyny zerurlyklaryna görä çeýe düzüp biljekdigini we programma üpjünçiligi arkaly netijeli işlemegini meýilleşdirip biljekdigini aňladýar. Durnukly we ygtybarly akylly enjam önümlerinden başga-da, garaguş ösümlikleriniň akylly programma üpjünçiligini meýilleşdirýän super uly toparlary hem bellemelidiris.
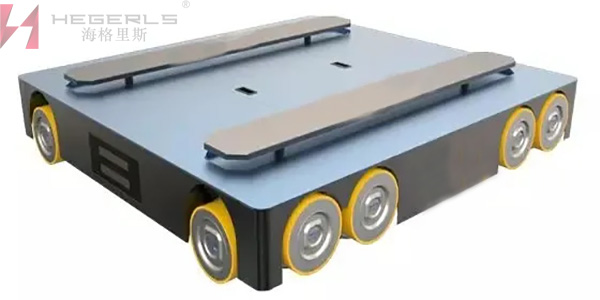
Adaty önümler hökmünde paletli dört taraplaýyn awtoulaglar biri-biri bilen çalşyrylyp bilner we islendik dört taraplaýyn awtoulag kynçylykly dört taraply awtoulaglaryň wezipesini ýerine ýetirip biler. Dört taraplaýyn ulaglaryň sany tekjäniň ýol çuňlugy, ýükleriň umumy mukdary we giriş we çykyş ýygylygy ýaly faktorlar bilen doly kesgitlenýär. Beden dizaýnynyň yzygiderli gowulaşmagy bilen, dört taraplaýyn palet kem-kemden akylly işleýän robota öwrüldi. Işleýiş netijeliligi we çeýeligi ep-esli gowulaşdy we ulanylyşy indi harytlary tekjede saklamak bilen çäklenmeýär. Ammaryň öňünde işlemek, saýlamak we beýleki ssenariýalar üçin ulanylyp bilner, bu ulgam meýilnamalaşdyrmagyň kynlygyny şübhesiz ep-esli ýokarlandyrýar.
Klaster meýilnamasyna goşmaça, “köp obýektiw hyzmatdaşlygy” hem göz öňünde tutmalydyrys. Bu meseleler / rs üçin yzygiderli, ýöne dört taraplaýyn gatnaw ulgamyndaky işler parallel we köp meseleler biri-birine baglydyr. Haýsy dört taraplaýyn ulagyň iň täsirli iş re modeimine baha bermeli, sebäbi ulgamda näbellilikler köp. Mundan başga-da, sargyt çeşmeleri, konteýner çeşmeleri, ammaryň ýerleşiş çeşmeleri, ulag serişdeleri we ş.m. ýaly çeşme şertlerine baha bermeli, umumy optimal meýilnamany ýerine ýetirmek üçin göteriji we dört taraplaýyn ulag ýaly dürli enjamlar bilen hyzmatdaşlyk etmeli. ulgamynyň. Şonuň üçin meýilnamalaşdyryş programma üpjünçiligi toparlaýyn meýilnamalaşdyrmagyň, köp obýektiw, ylalaşyk we hyzmatdaşlygyň esasy talaplaryny kanagatlandyrmagy başarmaly. Higgins meýilnamalaşdyryş programma üpjünçiligi güýçli köp obýektiw utgaşdyrmak ukybyna eýedir. AI algoritmi arkaly dört taraplaýyn ulaglaryň akyl-paýhasyny ýokarlandyryp, bir gatda birnäçe ulagyň işlemegini goldap biler, päsgelçilikleri ýüze çykaryp biler we ulgam howpsuzlygyny ýokarlandyryp biler.
Dört taraplaýyn akylly paletiň funksiýa çarçuwasy
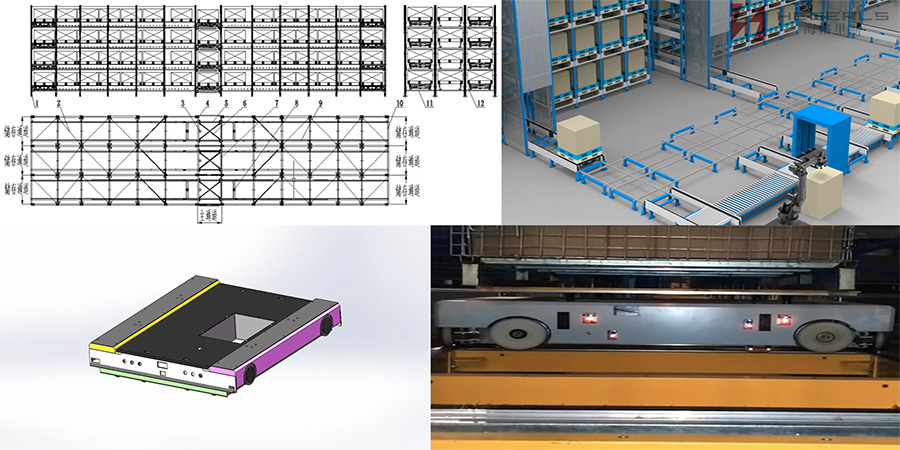
Palet dört taraplaýyn gatnaw awtomatiki dykyz saklaýyş ulgamy palet konsolidasiýasyny kabul edýär. Tekstiň gurluşyndaky ammar ýerleri dykyz ýerleşdirilen we haryt torunyň saklanyş çuňlugy 1 paletden uly. Storageokary ammar ýerini ulanmak we awtomatiki işlemek ukyby bar, ammaryň gurluşyna we beýikligine pes talaplar bar. Saklaýyş ulgamy ammarda ýerleşdirilip, ammar, ýüklemek we düşürmek amallaryny tamamlamak üçin gurnama / sökmek platformasy, forklift (ýa-da forklift işine goşuljak ýerüsti AGV) bilen hyzmatdaşlyk edýär. Amal wagtynda ammaryň sakçysy, tallyman we forklift operatory ammaryň içindäki we daşyndaky harytlary tamamlamak üçin dolandyryş we gözegçilik maglumat ulgamynyň tabşyrygy boýunça biri-biri bilen hyzmatdaşlyk edýär. Operasiýa gatnaşýan desgalar we enjamlar forkliftler, palet dört taraplaýyn gatnawlar, tekjeler, serwerler (ýerleşdiriş dolandyryşy we gözegçilik maglumat ulgamy), paletler, RF bellikleri, RF okaýjy enjamlar we elde işleýän terminallardyr.
Harytlaryň ammar amaly prosesi esasan dört baglanyşygy öz içine alýar: uzyn paletler - forklift transporty - konweýer liniýasy ýa-da beýleki periferiýa enjamlary - Palet dört taraplaýyn gatnaw transport ulgamy (dik lifti daşamak we dört taraplaýyn gatnaw gatnawy).

Harytlary ammar etmek işinde ilki bilen dolandyryş we gözegçilik maglumat ulgamy ammar amallary meýilnamasyny ammar tertibine laýyklykda düzýär. Uzyn we palletizasiýa edýän operatorlar gelen köp sanly harytlaryň paletizasiýa amalyny ýerine ýetirýärler we palletizasiýa operasiýa maglumatyny elde göterilýän terminal arkaly dolandyryş we gözegçilik maglumat ulgamyna ýükleýärler; Soňra palet önümleri tekjede goýulýar. Forklift paleti tekjäniň portuna ýa-da geçiriji liniýadaky material portuna daşaýar. Portda oturdylan RF okaýyş enjamy palet önümleri barada maglumat almak üçin paletdäki RF belligini okaýar we dolandyryş we gözegçilik maglumat ulgamy palet önümlerine ammar ýerlerini belleýär; Netijede, palet dört taraplaýyn gatnaw palet önümlerini portdan bellenen ýere daşaýar. Harytlaryň daşarky işleýiş prosesi tersine, şeýle hem dört baglanyşygy öz içine alýar: dört taraplaýyn gatnaw gatnawy (wertikal lifti we dört taraplaýyn gatnaw gatnawyny goşmak bilen) - konweýer liniýasy ýa-da beýleki periferiýa enjamlary - daşardan daşalýan daşama iberiş (gaplamak we yzyna gaýtarmak ýaly) ammaryna). Amal prosesi ammarlara ters gelýär. Ammarda we ammarda işlemek müşderiniň işleýiş prosesine esaslanmalydyr we ammaryň we ammaryň işleýşiniň netijeliligini we hilini üpjün etmek üçin enjamlaryň göwnejaý dolandyryş düwmesi kesgitlenmeli.
Palet çeýe logistika çözgüdiniň täze nesli hökmünde, hegris hegerls akylly palet dört taraplaýyn gatnaw ulgamy ýokary dykyzlykly ammar, güýçli saýt uýgunlaşmagy, çeýe giňelmek, gysga eltiş sikli we ş.m. Fiziki kärhanalar üçin maýa goýumlaryny (ROI) has gowy girdeji bilen awtomatiki we akylly ammar çözgütleri bilen üpjün edip biler.
Iş wagty: Awgust-02-2022