


Bar bolan tehnologiýada ammar logistikasy köp zähmet talap edýän pudaga degişlidir. Jemgyýetiň ösmegi we adam resurslarynyň bahasynyň ýokarlanmagy bilen jemgyýetdäki köp kärhanalar häzirki wagtda zähmet ýetmezçiligini çözmek, ammar ammaryny we beýleki ammar logistika meselelerini gowulandyrmak üçin awtomatiki üç ölçegli ammarlary ulanýarlar. Şolaryň arasynda akylly dört taraplaýyn gatnaw roboty, dört taraplaýyn sürmegi, ýagdaýyň üýtgemegini yzarlamagy, awtomatiki usulda işlemegi, akylly gözegçilik we traffigiň dinamiki dolandyryşyny birleşdirýän akylly işleýiş enjamydyr. Bazaryň islegine we pudagyň ösüş zerurlyklaryna jogap hökmünde HEGERLS dürli zerurlyklary kanagatlandyrmak üçin standart, ultra inçe we dar kanal akylly gatnaw robotlaryny yzygiderli ösdürdi.
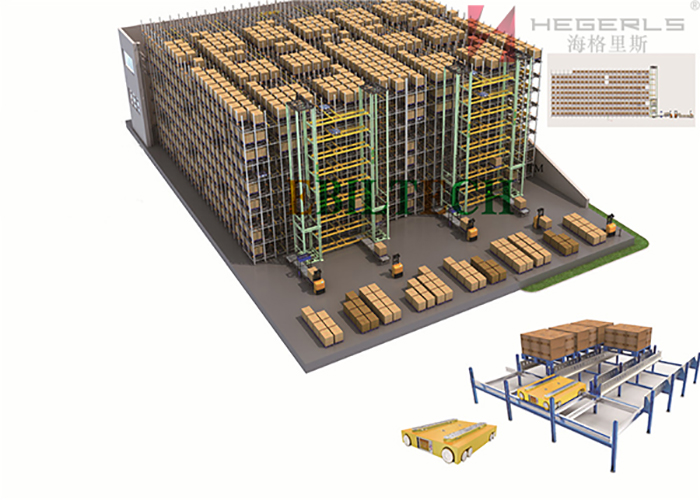
Dört taraplaýyn ýük awtoulag ammary, adatça binanyň görnüşine we palet görnüşine bölünýän intensiw akylly saklaýyş ulgamynyň täze görnüşidir. Aralaryndaky tekjäniň gurluşlary gaty meňzeýär, ýöne dizaýn jikme-jikliklerinde we dört taraplaýyn gatnaw awtoulaglarynda tapawutlar bar. Häzirki wagtda lukmançylyk, azyk, temmäki we beýleki ugurlarda giňden ulanyldy. Tekst harytlary saklamak üçin ulanylýar, dört taraplaýyn akylly gatnaw tekjede haryt daşamak üçin ulanylýar we programma üpjünçiligini dolandyrmak ulgamy dört taraplaýyn gatnawyň we beýleki awtomatiki enjamlaryň işleýşine gözegçilik etmek we hakyky ýagdaýy ýazmak üçin ulanylýar. harytlar. Dört taraplaýyn gatnaw stereoskopik ammary, ammar giňişliginiň ulanylyş derejesini ep-esli ýokarlandyryp, tekjäniň üsti bilen intensiw saklamaga ýetip biler. Dört taraplaýyn gatnaw harytlary awtomatiki daşamaga mümkinçilik berýär. Söwda we tertipleşdirmek üçin harytlary üç ölçegli tekjedäki islendik ýere daşap biler.
Dört taraplaýyn gatnawyň işleýiş ýörelgesi
Dört taraplaýyn gatnaw awtoulagy, ýapyk tegelek ýolda hereket edýän gatnaw awtoulagyny aňladýar. .Agny, dört taraplaýyn gatnaw X oky we Y oky boýunça hereket edip biler. X okunyň hereketlendiriji birligini we Y okunyň hereketlendiriji bölümini bellemek bilen, kemer hereketlendirijisi X ok ugry we Y ok ugry boýunça hereket edýär. Düzediş bölümi X okunyň hereket edýän birliginiň göterilmegine gözegçilik edýär. Y ok ugry boýunça hereket edende, Y okunyň hereketlendiriji birligi awtoulagyň göwresini herekete getirýär we X okunyň hereketlendiriji bölümi togtadylan ýagdaýda; Y okunyň ugrundan X ok ugruna öwrülmeli bolanda, sazlaýjy bölüm X okunyň hereket edýän bölümini aşaklygyna süýşürip biler, şeýlelik bilen X ok hereketlendiriji birligi ulagyň korpusyny herekete getirer we Y ok hereket birligi Y okunyň ugrundan X okuna geçmek maksadyna ýetmek we dört taraplaýyn gatnawyň tegelek görnüşde hereket etmegine mümkinçilik bermek üçin togtadylan ýagdaýda.
S: Akylly logistika enjamlaryny öndüriji hökmünde HGRIS tarapyndan öndürilen we öndürilen akylly dört taraplaýyn gatnawyň aýratynlyklary nämeler?
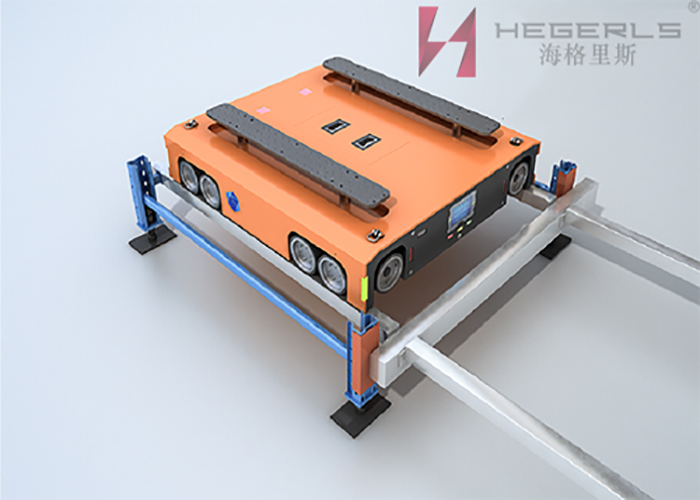
Hig Higelis tarapyndan öndürilen we öndürilen akylly dört taraplaýyn gatnaw awtoulaglary, mehaniki gurluşy optimizirlemek üçin deňleme we güýçlendiriji dizaýn kombinasiýasyny kabul edýär, şonuň üçin awtoulaglaryň az energiýa sarp edilişini, ýokary netijeliligini, ygtybarly we durnukly işlemegini üpjün edýär;
Machine Bütin maşynyň ulagy ýeterlik güýç we gysylma garşylygyna eýe bolmaly we deformasiýa aňsat bolmaz;
Wheel Tigir materialy poliuretan bolmaly. Poliuretanyň ýokary kesiş garşylygy, aşgazana garşylygy, ýag garşylygy we ş.m. artykmaçlyklary bar;
Multi Köp derejeli apparat we programma üpjünçiligine gözegçilik çärelerini kabul ediň, howpsuz iş aralygyny we höküm ýörelgelerini kesgitläň we belli bir çäk çäklendiriji ýa-da agdarmaga garşy mehanizm arkaly tutuş ulagyň howpsuz işlemegini üpjün ediň.
Information Maglumatlary dolandyrmak we real wagt ibermek ulgamynyň buýrugy bilen köp ulagly hyzmatdaşlyk amala aşyrylyp bilner;
Ff Netijeli, takyk, akylly meýilnama, arassa we pes ses, çeýe konfigurasiýa;

S: “Hygris” dört taraplaýyn gatnawyň dört taraplaýyn gatnaw ulgamynyň netijeli işlemegini üpjün etmek üçin ýörite funksional dizaýnda artykmaçlyklary näme?
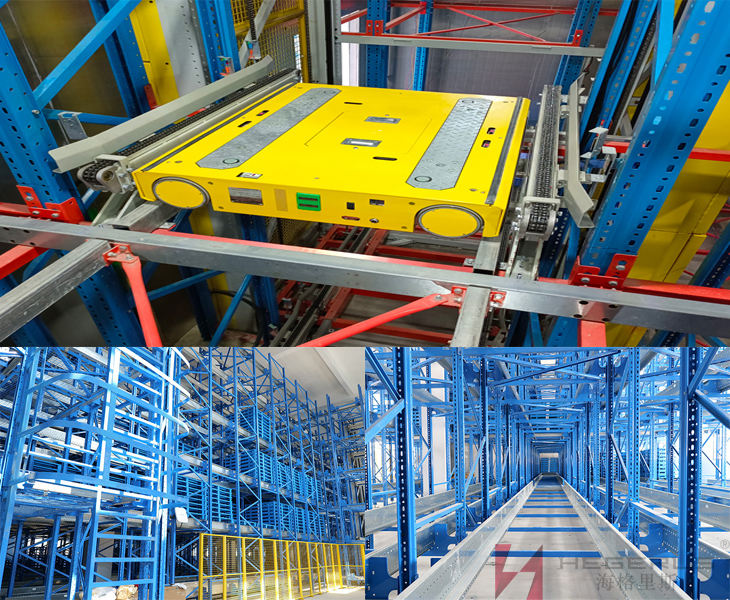
◇ Dört ýol sürmek: Stereo ammaryň ýörite ýolunda dört ugurda hereket edip biler we WCS meýilnamasy boýunça ammaryň islendik kesgitlenen ýerine baryp biler.
◇ reerli tersine öwrüliş funksiýasy: iki tarapa degişli tigirleri üýtgedip, ulagyň korpusynyň ýerli tersine öwrülmegini amala aşyryň.
◇ Akylly iberiş dolandyryş tertibi: WCS onlaýn awtomatiki iberiş tertibi, uzakdan dolandyryş dolandyryş usuly we tehniki hyzmat tertibi.
◇ Batareýanyň temperaturasyny duýmak: ulagyň korpusynda batareýanyň temperaturasyny hakyky wagtda kesgitlemek. Batareýanyň temperaturasy bellenen ýokary çäkden geçende, adaty bolmadyk batareýanyň temperatura maglumatyny WCS-e hakyky wagtda beriň. WCS ýangynyň öňüni almak üçin ulaglary ammaryň daşyndaky ýörite stansiýa iberýär.
Ging Zarýad bermegi kesgitlemek: ulag zarýad beriş ýagdaýyna ýetende, zarýad beriş prosesinde adaty zarýad berilýär we adaty bolmadyk maglumatlar WCS-e hakyky wagtda berilýär. . zarýad beriş tertibi tozan we partlama garşy gurşaw üçin ulanylýar, täsin goşa hereketlendiriji başlangyç we tizlenme tertibi ýokary tizlenme we tizlenme astynda durnukly işlemegi amala aşyryp biler.)
Omatic Awtomatiki zarýad bermek we gaýtadan işlemek: ulag bellenen pes kuwwatdan pes bolanda, degişli güýç maglumatlary awtomatiki usulda WCS-e ýüklener we WCS zarýad beriş işini ýerine ýetirmek üçin ulagy iberer. Ulag kesgitlenen kuwwat bahasyna zarýad berlenden soň, degişli güýç maglumatlary awtomatiki usulda WCS-e ýüklener we WCS bu işi dowam etdirmek üçin ulagy iberer.
Display Status displeýi we duýduryş: ulagyň dürli işleýiş ýagdaýlaryny anyk görkezmek üçin awtoulagyň köp ýerinde ýagdaý görkeziji lampalar oturdylýar. Awtoulag näsazlygy ýüze çykan halatynda duýduryş bermek üçin ses çykaryjy goşulýar.
◇ Gyssagly güýç halas edişi: adatdan daşary ýagdaýlarda, batareýanyň güýji nol bolanda, gyssagly güýç ulanyň, motor tormozyny açyň we ulagy degişli hyzmat ýerine geçiriň.
◇ Palet duýgusy: ulagda palet merkezi kalibrleme we palet kesgitlemek funksiýasy bar
Icle Awtoulagyň zarbasynyň siňdirilmegi: basyşa garşy durmak, garşylyga garşy durmak, basyşa garşylyk we şok siňdirişi üçin ýörite poliuretan tigirleri ulanylar.
Osition Positionerleşiş kalibrlemesi: takyk ýerleşişe ýetmek üçin tuneliň iki ölçegli kody bilen üsti ýetirilen köp sensorly kesgitleme.
Ak Bölüm nokadynyň dowamy: ulag harytlary içerde we daşarda ýerine ýetirýän mahaly, päsgelçiliklerden gaça durmak we toruň kesilmegi ýaly gysga möhletli enjam däl näsazlyklar sebäpli, ulag adaty bolmadyk ýagdaý aradan aýrylýança awtomatiki usulda adam gutarmazdan ýerine ýetirilmegini dowam etdirer. .
Leep Uky we oýanmak tertibi: Uzak garaşandan soň, güýji tygşytlamak üçin uky re modeimine giriň. Againene işlemeli bolanda awtomatiki oýanýar.
Päsgelçilik duýgusy: ulagda dört taraplaýyn päsgelçiligi kabul etmek funksiýasy bar, uzakdaky päsgelçiliklerden gaça durmak we ýapmak.
Tehnologiýany birleşdirmek we ösdürmek bilen dört taraplaýyn ulaglar akylly meýilnamalaşdyrmagy optimizirlemegi, iş netijeliligini ýokarlandyrmagy, has çalt we has takyk ýerleşiş bilen has akylly amallary gazanmagy we ýokary çykdajyly basyşy ýeňletmegi, tygşytly häzirki zaman logistika enjamyna öwrüler. .

HEGERLS, awtomatiki ammar we ammar tekjeleriniň önümi ösdürmäge, dizaýn etmäge, öndürmäge, satmaga we gurnama hyzmatlaryna bagyşlanan üç ölçegli ammar we ammar tekjesi. Şeýle hem, ähli taraplaýyn, doly seriýaly we doly hilli ammar we logistika bilen bir bitewi toplumlaýyn hyzmat üpjün edijidir. Awtomatiki ammar we logistika enjamlaryny öndürýänleriň biridir. Önümçilik we gözleg bazasy 60000 ㎡, doly awtomatiki partlaýyş enjamy bar, san gözegçilik möhürlemesi, sowuk we gyzgyn rulonlaryň uzyn gyrkylmagy, umumy profil tegelek zawody, X tekjeli tegelek, kebşirlemek, 48 sany dünýä ösen önümçilik liniýasy bar. awtomatiki elektrostatik poroşok sepmek we ş.m. Gözleg we önümçilik, önümçilik, satuw, gurnama we satuwdan soňky hyzmatda 300-den gowrak adam bar, şol sanda ýokary derejeli tehnikler we uly inersenerler bilen 60 töweregi adam.
HEGERLS önümlerine esasan awtomatiki üç ölçegli ammar, doly awtomatlaşdyrylan akylly intensiw ammar, üç ölçegli ammar, dört taraplaýyn gatnaw ulagy üç ölçegli ammar, esasy gatnaw ulagy üç ölçegli ammar, köp gatly gatnaw ulagy üç ölçegli ammar, agyr tekje, üç ölçegli ammar tekjesi, gatnaw tekjesi, beýik tekjeli, polatdan ýasalan platforma, polatdan ýasalan tekje, dar geçelge tekjesi, ammar tekjesi, orta tekjesi, agyr tekjesi Haç şöhle tekjesi, koridor tekjesi, arassa tekje, kantilwer tekjesi, logistika bilen işlemek enjamlar, konweýer liniýasy, lift, AGV, modully gap, gural saklaýyş enjamlary, ussahana stansiýasy enjamlary, ussahanany izolýasiýa enjamlary, howa iş enjamlary, akylly saklaýyş ulgamy, WMS ammar dolandyryş ulgamy, WCS ammar dolandyryş ulgamy, ulgam integrasiýasy we ş.m.
Higelis stereoskopik ammaryň tekjeleri howa, howa, sowuk ammar sowuk zynjyry, elektronika we enjamlar, enjam enjamlary, logistika we paýlanyş, mata dokma, geýim oýunjaklary, çap we gaplamak, gurluşyk materiallary, gurallar we metrler ýaly köp pudaklarda ulanylýar. metallurgiýa we minerallar, himiki örtükler, öý şkaflary, howpsuzlyk enjamlary, lukmançylyk, temmäki, azyk we beýleki pudaklar.
Her bir müşderiniň iş görnüşine esaslanyp, saýt şertleri, harytlaryň aýratynlyklary, ätiýaçlyk talaplary, girýän we çykýan ýygylygy, saýlama we iberiş usullary we kärhanany ösdürmegiň strategiki meýilnamalaşdyryşy, satuwdan öňki maslahat beriş, meýilnamalaşdyrmakdan doly durmuş siklini üpjün edýär. we satuwdan soň hyzmat etmek üçin dizaýn, taslamany durmuşa geçirmek we müşderiler üçin material saklamak we dolanyşyk zerurlyklaryny kanagatlandyrmak üçin ýöriteleşdirilen çözgütleri döretmek. Biziň çözgütlerimiz giriş, daşamak, işlemek we saýlamak ýaly birnäçe baglanyşygy öz içine alýar we ulgam platformasy ammardan önümçilige çenli ähli prosesi öz içine alyp biler. Paletleriň, gaplaryň ýa-da tertipsiz materiallaryň saklanmagy bolsun, kompaniýamyz aňsatlyk bilen çydap biler we ahyrsoňy hünärmen we ygtybarly shema dizaýny we taslamany durmuşa geçirmek bilen müşderileriň ynamyny gazanyp biler.
Iş wagty: 20-2022-nji sentýabr