


Dykyz ammar üçin möhüm transport enjamy hökmünde dört taraplaýyn akylly palet görnüşli akylly awtoulag awtomatiki tersine öwrülişi we üýtgeýän transport enjamlaryny yzarlaýan akylly ýol. Elektrik dolandyryş ulgamynyň gözegçiligi astynda kodlaýjylar, RFID, fotoelektrik datçikleri ýaly sanly tehnologiýalar arkaly her giriş we çykyş stansiýasyny takyk kesgitleýär we akylly meýilnama ulgamy bilen enjamlaşdyrylýar. Materiallary alandan soň, daşamak üçin awtomatiki usulda yza çekilýär. Dört taraplaýyn palet adam işlemegini talap etmeýär, dürli logistika saklaýyş ulgamlary üçin amatly çalt işleýiş tizligi we ýokary akyl, birlik materiallarynyň tekiz awtomatiki daşalmagyna kömek edip biler. Akylly meýilnamalaşdyryş ulgamlary bilen dolandyrylýan, köp gatlakly we köp ulagly bilelikdäki paralel amallar, kärhananyň logistika saklaýyş ulgamlary üçin täze logistika çözgütlerini üpjün edip, takyk we täsirli iş reesimlerine ýetmek üçin amala aşyrylýar.
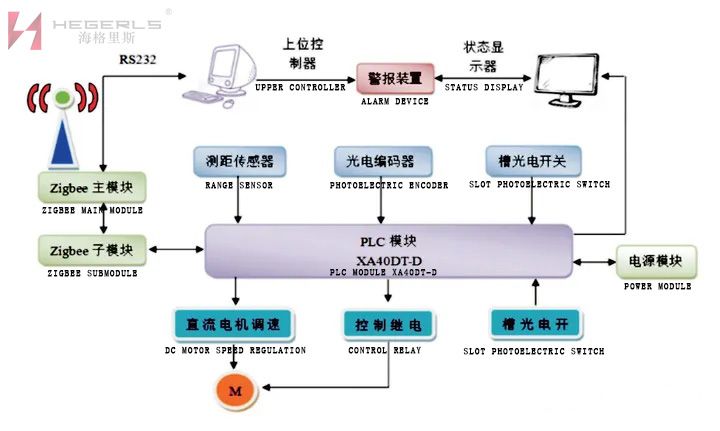
Dört taraplaýyn gatnawly awtoulag saklaýyş ulgamyny ornaşdyrmakda esasy kynçylyklar we esasy nokatlar enjamlaryň ygtybarlylygy, aragatnaşyk we ýerleşiş tehnologiýasy, meýilnama ulgamy we ş.m. Aýratyn-da, enjamlaryň ygtybarlylygy nukdaýnazaryndan Hebei Woke HEGERLS esasan önümiň ygtybarlylygyny gazanýar. üç tarapdan. Ilki bilen, ulagyň işleýşine real wagt gözegçiligini üpjün etmek üçin ulagyň korpusynda 16 datçik düzüldi; Ondan soň, gözegçilik durnuklylygyny ýokarlandyrmak üçin Siemens s7-200 SMATER seriýasyndan standart PLC saýlaň. Mundan başga-da, HEGERLS palet dört taraplaýyn gatnaw, tutuşlygyna modully dizaýny kabul edýär, bu bolsa komponentleri şowsuz bolanda çalyşmagy has amatly we täsirli edýär. Şol bir wagtyň özünde beýleki kiçi awtoulaglar üçin hem goldaw bermek amatly. Structhli gurluş düzüm bölekleri Hebei Woke tarapyndan özbaşdak işlenip düzülýär we hiline we takyklygyna berk gözegçilik edýär.
Aragatnaşyk we ýerleşiş tehnologiýasy nukdaýnazaryndan ýokary dykyzlykly harytlar we tekjeler, adatça, aragatnaşyk signallarynyň berilmegine päsgelçilik döredýär, şeýlelik bilen paletiň dört taraplaýyn gatnawynyň we ulgamynyň maglumat alyş-çalyş netijeliligine täsir edip, nädogry ýerleşiş we pozisiýa ýitmegine sebäp bolýar. Dürli hakyky ýagdaýlara görä, Hebei Woke ammarda dört taraplaýyn gatnaw ulaglarynyň bökdençsiz aýlanmagyny amala aşyrmak üçin kodlaýjynyň ýerleşişini, lazer ýerleşişini, ştrih-kod / iki ölçegli kod ýerleşişini, RFID ýerleşdiriş we beýleki ýerleşdiriş usullaryny saýlady. ulagyň ukyby, deňagramlylygy awtomatiki ýüklemäge mümkinçilik beriň we şeýlelik bilen şowsuzlygyň ýekeje nokadyny ýok ediň.
Meýilnama ulgamlary nukdaýnazaryndan diňe köp ulagly meýilnama ulgamyny ornaşdyrmak arkaly dört taraplaýyn gatnaw ulaglarynyň ulanylyşy ep-esli gowulaşyp biler. “HEGERLS” dört taraplaýyn gatnawly köp ulagly meýilnama ulgamy dört tarapy öz içine alýar: kosmos hereketine gözegçilik, meseläni bölmek, enjamlaryň işleýşiniň derňewi we ýol meýilnamasy.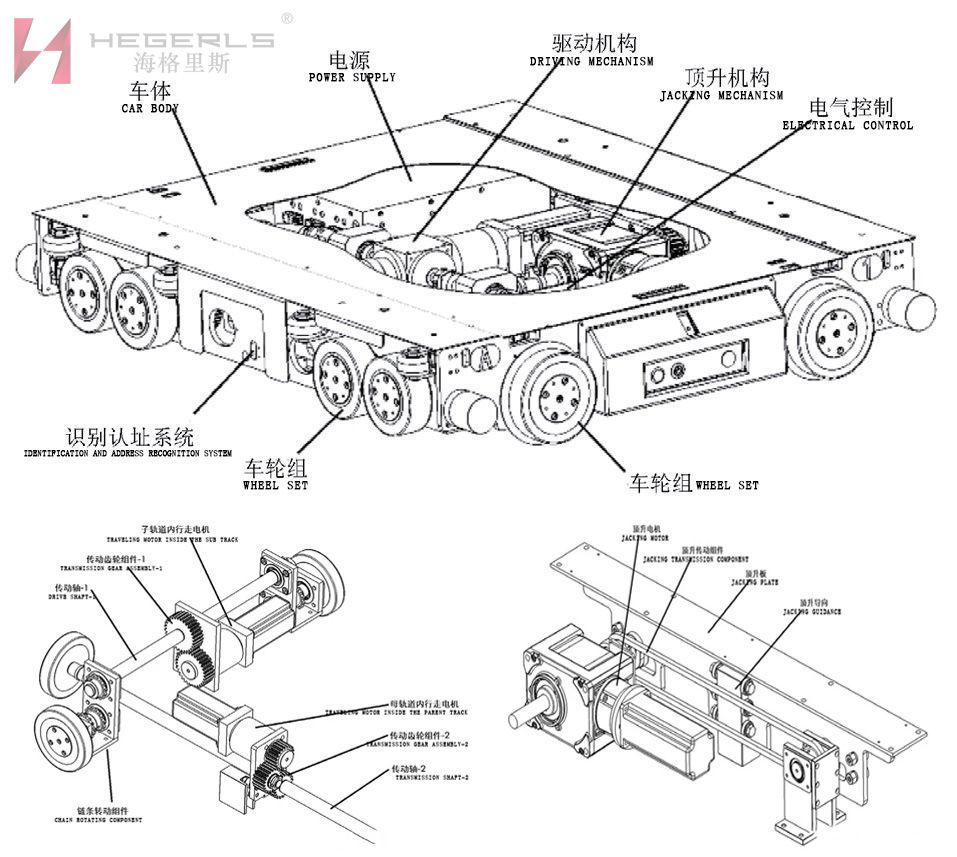
Hebei Woke tarapyndan özbaşdak işlenip düzülen we öndürilen HEGERLS palet dört taraplaýyn gatnaw awtoulagynyň umumy mehanizm dizaýny beýleki öndürijilerdenem tapawutlanýar. HEGERLS paletiniň dört taraplaýyn gatnaw awtoulagynyň esasy mehanizmi dizaýny:
Wezipe talaplaryna laýyklykda dört taraplaýyn ulag, dürli gatlaklarda we tekjeleriň ýük zolaklarynda işleýiş ýoly arkaly ýerine ýetiriş wezipelerini ýerine ýetirmek üçin özara jogap beriji lift bilen hyzmatdaşlyk edýär. Ammaryň gözegçilik ulgamynyň gözegçiligi we meýilnamasy boýunça, dykyz ammar bir wagtyň özünde köp gatlakly we köp ulagly işe ýetip biler. Her dört taraplaýyn ulag, iş wagtynda maglumat dolandyryş ulgamyna ýerleşiş, tizlik, elektrik, elýeterlilik, näsazlyklar we iş şertleri ýaly maglumatlary ýükläp biler; Dört taraplaýyn ulag köp mukdarda saklamak we gözlemek, ýük hereketi we palet sanamak ýaly funksiýalara eýedir, çalt material ibermäge we inwentar dolandyryşyna mümkinçilik berýär; Içerki päsgelçiliklerden gaça durmak funksiýasy we näsazlyk duýduryşyny öz wagtynda üpjün edip bilýän päsgelçiliklerden gaça durmak funksiýasy bilen enjamlaşdyrylan. Apparat ulgamynyň nukdaýnazaryndan dört taraplaýyn ulag esasan çarçuwa, göteriş mehanizmi, hereketlendiriji mehanizm, tigir topary, elektrik üpjünçiligi, elektrik gözegçiligi we ş.m. ýaly böleklerden durýar.
1) Ulagyň gurluşy
Modul dizaýn tehnologiýasy ýokary hilli polady birleşdirmek arkaly emele gelen dört taraplaýyn ulagyň beden gurluşyna ulanylýar. Ulagyň dizaýn ýük göterijiligi 1500 kg ýa-da ondanam köp, iň pes howpsuzlyk faktorynyň 1,6 bolmagy maslahat berilýär. Maddy hasyllylygy 2,75 MPa; Dört taraplaýyn ulagyň korpusynyň gurluşy, ähli ulagyň ygtybarlylygy we gurluşyň ýeňil bolmagy üçin optimallaşdyryldy.
2) kakmak mehanizmi
Dört taraplaýyn ulagyň işlemegi birnäçe ýokary we aşak hereketleri talap edýär we mehaniki mehanizm ýa-da gidrawliki ýokarky enjam dizaýn edilmeli. Mehaniki gurluşyň howpsuzlygyny, ygtybarlylygyny we berkligini göz öňünde tutup, 40 mm göteriji urgy we göteriş wagty 3-5 sekunt bolmagy maslahat berilýär. Dört taraplaýyn ulag paletany götermek we düşürmek we harytlaryň göterilmegini tersine üýtgetmek arkaly bir iş siklini tamamlaýar. Işleýiş netijeliligini ýokarlandyrmak üçin, dört aýlawly ulagyň iş siklini gysgaltmak üçin iş prosesinde çalt peselmegini we tersine öwrülmegini üpjün etmeli.
3) Sürüjiniň mehanizmi we tigirleri
Dört taraplaýyn ulag sürmek mehanizmi, iki ugurda çalt gatnawy öňe sürmek üçin servo motor hereketlendirijisini, planetanyň tizlenmesini we kommutatoryny kabul edýär. Adaty iş şertlerinde, ýüklenmeýän iş tizligi 1,4 m / s ~ 1,6 m / s, ýüküň doly tizligi 1,0 m / s ~ 1,2 m / s; Tekst derejesinde keseligine ylgaýarka, dört taraplaýyn ulag X ugurda 4 tigirli we Z ugurda 8 tigirli hereketlendiriji kabul edýär. 8 tigirli (hereketlendiriji we hereketlendiriji tigirleriň kombinasiýasy) geçiriş tertibi, içerki mehaniki ulgamyň çylşyrymlylygyny azaltmak bilen ulagyň ýöremeginiň durnuklylygyny üpjün edip, ulgam dizaýn talaplaryna laýyk gelýär. Dört taraplaýyn awtoulag hereket edende, tigirleri uzak wagtlap sürtülýär we könelişen tigirleri talap edýär. Öndürijilik synagyndan soň poliuretan tigirleri çydamlylygy, sesiň peselmegini we işleýiş durnuklylygyny üpjün etmek üçin saýlanýar.

Dört taraplaýyn “Hagrid HEGERLS” paletiniň çeýe köp gatlakly we köp ulagly işleýiş tertibi, giriş we çykmak amallarynyň netijeliligini ep-esli ýokarlandyrýar, adaty üç ölçegli ammarlaryň kynçylyk meselesini çözýär, bu ýerde staker diňe bir zolakda girip-çykyp bilýär. . Soňky ýyllarda içerki we daşarky ammar bazarlarynyň hakyky zerurlyklaryndan ugur alyp, Hebei Woke täze görnüşi, doly funksiýalary, howpsuzlygy we ygtybarlylygy ýaly tehnologiki artykmaçlyklary bolan paletli dört taraplaýyn gatnaw awtoulaglaryny öndürdi. Satuwdan soňky hyzmat ulgamlaryndan başga-da, geljekde Hebei Woke akylly ammar ösüşiniň güýçli güýjüne berk düşüner, elmydama müşderileriň isleg ugruna ygrarly bolar we müşderilere ýokary akyl we karar kabul etmegi Integrirlenen akylly ammar umumy çözgüdi.
Iş wagty: Maý-19-2023