


Akylly awtoulag görnüşli ammar we logistika robotlarynyň lideri hökmünde hegerler robot we emeli intellekt algoritmleri arkaly netijeli, akylly, çeýe we ýöriteleşdirilen ammar awtomatlaşdyryş çözgütlerini bermäge, her zawod we logistika ammarynda gymmatlyk döretmäge borçlanýar. Hagerls gözleg we gözleg gutusy robot ulgamynyň dizaýnyna ünsi jemleýär we robot ontologiýasy, aşaky ýerleşiş algoritmi, dolandyryş ulgamy, robot meýilnamasy, akylly saklaýyş dolandyryş ulgamy we ş.m. ýaly esasy elementleriň garaşsyz gözleg işlerine düşünýär. ýurtda we daşary ýurtlarda satylýar. Şol bir wagtyň özünde, onuň kubao ulgamy, 3PL, aýakgap we geýim, elektron söwda, elektronika, elektrik, önümçilik, lukmançylyk we beýleki pudaklarda ulanylýan we täjirçilik taýdan ulanylan ilkinji guty saklaýan robot ulgamydyr. Kubao ulgamyny ulanyp, müşderiler bir hepdäniň içinde ammaryň awtomatiki üýtgemegine, ammar dykyzlygyny 80% ýokarlandyryp we işçileriň iş netijeliligini 3-4 esse ýokarlandyryp bilerler.
Hagerls akylly ammar logistika çözgüdi
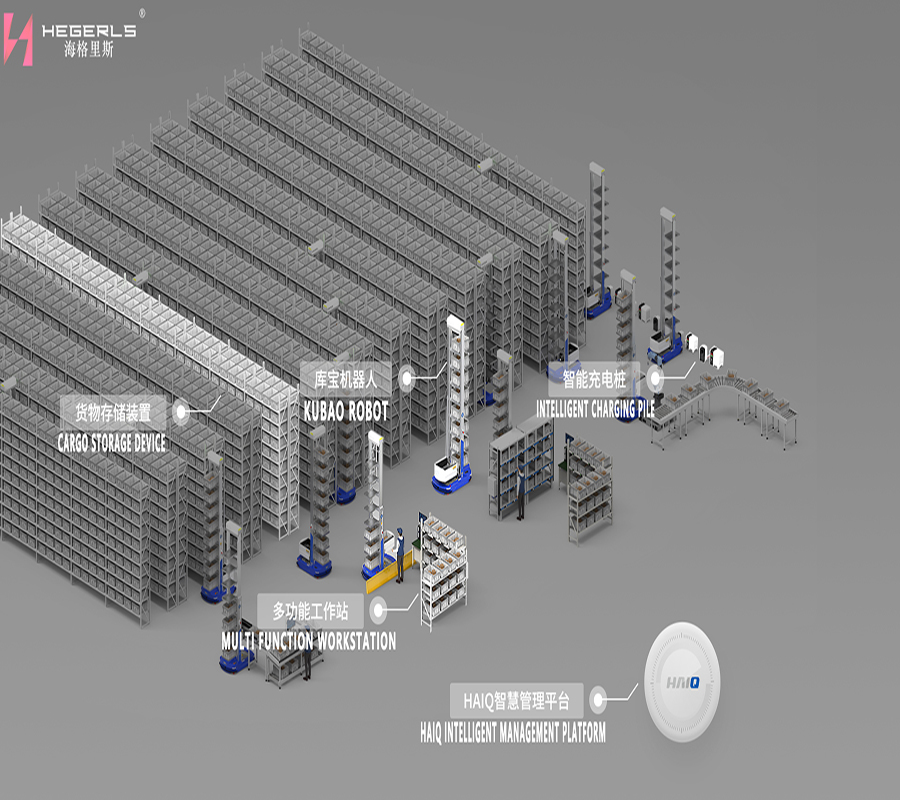
Kubao ulgamyna kubao roboty, köp funksiýaly iş stansiýasy, ýük saklaýjy enjam, akylly zarýad beriş stansiýasy we haiq akylly dolandyryş platformasy girýär. “Haýk” -a esaslanýan akylly meýilnama daşarky ulgam elýeterliligini, dürli logistika enjamlaryny meýilleşdirmegi, iş tertibini optimizirlemegi, wizual dolandyryş görnüşini we beýleki funksiýalary amala aşyryp biler we dürli ulanyş senarisine we pudagyň zerurlyklaryna laýyklykda müşderiler üçin ýöriteleşdirilen akylly çözgütleri üpjün edip biler. ammar, logistika we önümçilik zawodlary ýaly iş ssenariýalary. Elektron söwda, 3PL, önümçilik, bölek satuw, aýakgap we egin-eşik, elektronika, lukmançylyk we beýleki pudaklar üçin amatly.
Hegels guty saklaýan robot seriýasy
“Hegerls” tarapyndan özbaşdak işlenip düzülen Kubao roboty, “konteýner robotynyň” we “konteýner robotynyň” bölüniş meýdanlaryny açan täjirçilik gonuşyny döreden we amala aşyran ilkinji guty görnüşli ammar robotydyr. Üznüksiz gaýtalama we tehnologiki täzeliklerden soň, kubao-nyň önüm çyzgysy barha baýlaşdy. Häzirki wagtda ACR ulgamy A42 (köp gatly bin robot), a42d (goşa çuň bin robot), a42n (karton sortlaýjy robot), a42t (teleskopik göteriji bin roboty), otly A42 ýaly birnäçe önüm matrisasyny öz içine alýar. Köp ssenariý programmalar üçin amatly Slam (lazer slam bin robot), dürli saklaýyş agyry nokatlaryny çözýär, kärhanalara ammar işleýiş tizligini ýokarlandyrmaga we amal çykdajylaryny azaltmaga kömek edýär, ammar awtomatizasiýasynyň kämilleşdirilmegini amala aşyryň. Bu gezek lazer slam köp gatly bin robot hegerls a42m slam bilen tanyşdyrmakçy.

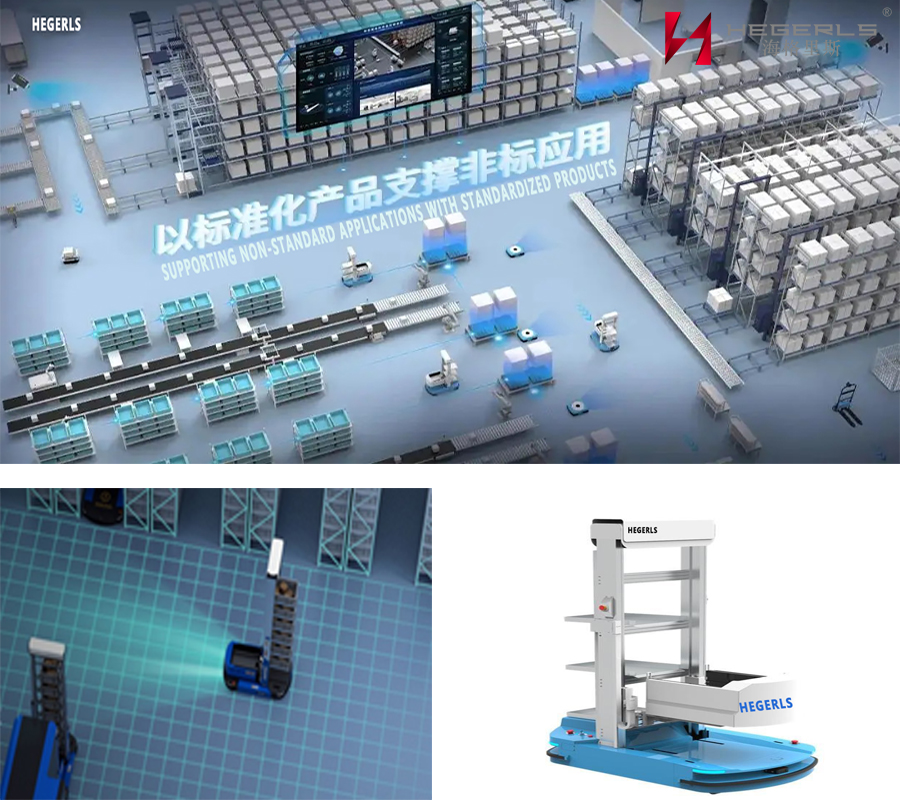
Lazer slam köp gatly bin robot hegerler a42m slam
Hergelsiň özbaşdak täzeligi, ähli harytlaryň esasan çyzykly ammar sahnasyny öňe sürmek bilen iki ölçegli kod nawigasiýa çyzgy re modeimini kabul etmegidir. Slam tehnologiýasynyň nawigasiýasynda we işleýşinde Siangong intellektiniň toplanmagyna bil baglap, bu kompaniýa tarapyndan işe girizilen lazer iki gatly material gutusy akylly robot lazer slam nawigasiýasyny amala aşyryp biler. Gurlan SRC ýadro gözegçisi, dört sany funksional ünsi özüne çekýär, nawigasiýa, howpsuzlygy we köp funksiýany birleşdirýär, ýumşak baglanyşygy, takyk material almagy we netijeli daşamagy tamamlaýar we gaýtadan işleýän ussahananyň çyzykly ammarynyň iň gowy hyzmatdaşy bolýar. akylly önümçilik ulgamy.
Kubao hegerls a42m slam lazer slam köp gatly bin robot, hegerler we görüjiler tarapyndan bilelikde döredilen guty saklaýjy robot. “Hegerls a42m slam” lazer slam awtonom nawigasiýasyny amala aşyryp biler we has ýokary howpsuzlyk, amaly, durnuklylyk we daşky gurşawyň ýokary uýgunlaşmagy bilen QR kod nawigasiýasyna erkin geçip biler. Täze akylly logistika işleýiş enjamy hökmünde, a42 metrlik hegerler hiç bir yzarlaýyş enjamynyň kömegi bilen ammarda akylly ýöremegi amala aşyryp biler. Awtonom nawigasiýa, işjeň päsgelçiliklerden gaça durmak, awtomatiki zarýad bermek, 3D tanamak we ş.m. ýaly funksiýalara eýedir we köp ölçegli kartonlaryň / gaplaryň garyşyk kesgitlemesini, saýlamagyny, elýeterliligini, nokada işlemegini amala aşyrýar. Akylly algoritm ýokary we pes sowuk we yssy ammar ýerleriniň we sebite kesişmegiň we saýlamagyň netijeliligini gowulandyrýar. Adaty AGV “tekje adama” çözgüdi bilen deňeşdirilende, kubo robot granulasy has kiçi. Ulgam tarapyndan berlen sargyt talaplaryna laýyklykda, adaty “haryt gözleýän adamlardan” täsirli we ýönekeý “harytlara adama” akylly seçip alyş tertibine öwrülmegi hakykatdanam durmuşa geçirilýär. Staker we awtomatiki üç ölçegli ammaryň çözgütleri bilen deňeşdirilende, kubao robot ulgamy umumy ýerleşdiriş bahasy pes we has çeýeligi bilen netijeli ýerleşdirmegi amala aşyryp biler; Şol bir wagtyň özünde, tekerler, gizlin AGV-ler, robot ýaraglar, köp funksiýaly iş stansiýalary we ş.m. ýaly dürli logistika enjamlarynyň dokalmagyny goldaýar. Çeýe önüm dizaýny, ýöriteleşdirilen çözgütler üçin has köp iş ýerini getirýär, netijeliligini hemmetaraplaýyn ýokarlandyrýar. ammar amallary, ammarlaryň dykyzlygyny optimallaşdyrýar we ammar pudagynyň awtomatlaşdyrylyşyny we akylly üýtgemegini amala aşyrýar. Ulanylýan ssenariýa: 3PL, aýakgap we egin-eşik, elektron söwda, elektronika, elektrik energiýasy, önümçilik, lukmançylyk, bölek satuw we beýleki pudaklarda, esasanam ýerdäki enjamlaryň hereketi we uly traffigi üçin amatly şertlerde ammar programmalary üçin amatly. Dürli ululyklary we çuňluklary özleşdirmegi goldaň.

Lazer slam köp gatly bin robot hegerls a42m slam ýadro artykmaçlyklary
Ultra takyk saýlama we ýeri
Bu lazer slam köp gatly bin robot goldaw ulgamy birikdirildi we takyk material ýygnamak we ýerleşdirmek, akylly seçip almak we netijeli işlemek, köp sanly gaplara bir gezek girmek we işlemek, garyşyk goldawy wizual AI we 2d / 3d wizual tanamaklygy kabul edýär. köp ölçegli kartonlary / gaplary saýlamak we ultra netijeli işlemäge kömek etmek.
Örän çeýe dok
Zawod işi çylşyrymly we dürli-dürli, logistika enjamlaryna bolan isleg hem başga. Lazer slam köp gatly bin robot, rolik, tekje, gizlin AGV, emeli iş stansiýasy we beýleki iş platformalary ýaly dürli enjamlary çeýe birleşdirip biler. Ammardan, çyzykdan we önümçilik liniýasyndan geçip biler we erkin alyp we ýerleşdirip bolar. Isleýşiňiz ýaly, has giň amaly ssenariýalar bilen çäksiz birikdirilip bilner.
Adatdan daşary dizaýn
Bu lazer slam köp gatlakly material guty roboty adatdan daşary dizaýny kabul edýär, 0.4m ~ 1,86M erkin göterilmegini amala aşyrýar, el bilen işleýiş tertibine uýgunlaşýar, dürli iş belentliklerine çeýe gabat gelýär, meýilnama we saklaýyş ulgamlaryna bökdençsiz girýär, akylly algoritm bilen işi çuňlaşdyrýar, döredýär amatly iş tejribesi we adam bilen kompýuteriň özara gatnaşygy has dostluklydyr.
Ultra çeýe ýerleşdiriş
Üýtgeýän iş gurşawyna garşy durup bilersiňizmi? Slam nawigasiýa, iki ölçegli kod nawigasiýasy, awtonom nawigasiýa, iki ölçegli kod nawigasiýasyny erkin üýtgetmek, ýönekeý gurnama, adaty gurnama liniýalarynyň çäklendirmelerini bozmak, aýratyn önümçilige düşünmek, çeýe bolmazdan, robotyň iş ýeriniň çeýe üýtgemegine uýgunlaşmagyna kömek edýär. akylly önümçilige mümkinçilik berýär.
Örän ygtybarly nawigasiýa
Siangong akylly tarapyndan işlenip düzülen SRC kontrolleýeri, roboty karta gurluşygy, ýerleşiş, nawigasiýa, köp maşyn meýilnamasy, awtomatiki zarýad bermek, 3D päsgelçiliklerden gaça durmak we beýleki funksiýalar ýaly esasy funksiýalary üpjün edýän lazer slam köp gatly bin robotyna guruldy. ultra howpsuz nawigasiýa gazanmak we işgärleriň howpsuzlygyny goramak üçin. Çylşyrymly adam-maşyn garyşyk meýdan gurşawy üçin amatly we has akylly we täsirli.

Esasy tehnologiýa üns beriň we önüm hyzmat bazaryny baýlaşdyryň
Hagerls bin saklaýan robotyň çözgüdine ünsi jemleýär. Üpjünçilik zynjyrynyň esasy bölegi hökmünde üpjünçilik zynjyrynyň netijeliligini we çeýeligini kanagatlandyrmak üçin ammarlary adaty el ammarlaryndan mehanizirlenen ammarlara, awtomatlaşdyrylan ammarlara we çeýe ammarlara yzygiderli ýokarlandyrmaly. Hegris Hegels, müşderilere çeýe, täsirli, akylly we ýöriteleşdirilen çözgütleri üpjün etmek we ahyrky netijede müşderilere ammarlarda we zawodlarda gymmatlyk döretmäge kömek etmek üçin emeli intellekt tehnologiýasyny we robot tehnologiýasyny ulanýar. Hagerls, müşderilere çeýe we täsirli çözgütleri üpjün etmek üçin kubao robotyny esasy önüm hökmünde alýar.
Iş wagty: Iýul-05-2022