



Saklaýyş roboty, esasan, awtomatiki usulda dolandyrylýan ulag (AGV), awtonom ykjam robot (AMR) we manipulýator ýaly harytlary işlemek, sortlamak, saýlamak we beýleki amallar üçin ulanylýan roboty aňladýar. Olaryň arasynda AGV we AMR ykjam robotlary, elementleri başlangyç nokatdan awtomatiki usulda daşamak meselesine jogapkärdir, manipulýator esasan ýok etmek we tertiplemek ýaly baglanyşyklarda ulanylýar. Programma ssenariýleri nukdaýnazaryndan, ammar robotlary esasan senagat önümçiliginde we täjirçilik dolanyşygynda ulanylýar. Şol bir wagtyň özünde, ammar roboty işlemegiň netijeliligini ýokarlandyrmak, agyr we howply iş üçin işçi güýjüni çalyşmak we önümçilik liniýasy bilen has gowy birikmek, ammarlary akylly dolandyrmak we önümçilik zerurlyklaryna öz wagtynda jogap bermek üçin ulanylýar. Saklaýjy robot, “awtomatiki ýygnamak” we “maglumat dolandyryşy” arkaly harytlary awtomatiki usulda işlemegi we tertipleşdirmegi amala aşyryp biler.
[saklaýyş robotynyň amaly ssenariýasy]
Iş ýüzünde ammar we logistika robotlaryndaky AGV, AMR we beýleki ykjam robotlar işde esasy güýje öwrüldi. Şeýle-de bolsa, manipulýator ýokary çykdajy we pes hereket bilen çäklendirilýär we ulanylyş derejesi birneme pes. Şeýle-de bolsa, uzak möhletde manipulýator 3D akylly kamera, AI görüş algoritmi we beýleki tehnologiýalar bilen bilelikde takyk kesgitlemäni we çeýe tertipleşdirmegi amala aşyryp biler we geljekde “pilotsyz ammar” gurluşygynda giňden ulanylyp bilner. has uly ösüş potensialy. Manipulýatory “ýaraglandyrmakdan” başga-da, emeli intellekt bilen görkezilen iň täze tehnologiýa ammar we logistika robot senagatynyň zynjyryny üýtgedýär. Adaty saklaýyş robot senagaty zynjyry, ýokary tehniki päsgelçilikler we çylşyrymly önümçilik prosesleri bilen esasy bölekler, beden önümçiligi, ulgam integrasiýasy, ahyrky müşderiler we ş.m. ýaly birnäçe gatnaşyjyny öz içine alýar. Şeýle-de bolsa, emeli intellekt tehnologiýasynyň ösmegi bilen adaty senagat zynjyry has çeýe bolýar.

[Hegels Hegels agyr goýberildi]
Awtonom hadysalary dolandyrýan robot ulgamynyň (ACR) öňdebaryjysy we lideri Hagerls, pudagyň ykrar edilmegini täzeledi we robot hagerleri A42 köp gatly korpus bilen işledi.
Hegerls guty saklaýan robot (ACR) ulgamynyň öňdebaryjysy we nawigatorydyr. Robot we emeli intellekt algoritmleri arkaly netijeli, akylly, çeýe we ýöriteleşdirilen ammar awtomatlaşdyryş çözgütleri bilen üpjün etmek, her bir zawod we logistika ammary üçin çykdajy bahasyny döretmäge borçlanýar. Kompaniýanyň aşagyndaky Kubao ulgamy, içerde we daşary ýurtlarda işlenip düzülen we ulanylýan ilkinji guty saklaýan robot (ACR) ulgamydyr. Recentlyakynda, akylly logistika pudagynda öňdebaryjy kärhana hökmünde Hegels ammar tekjesi bilen üpjün ediji, Hegels-iň täjirçilik howpsuzlyk standartlarynda täze belentligi bellän we bu üçin möhüm tapgyr bolan ikinji nesil Hegels A42 seriýaly guty robotlaryny özbaşdak dizaýn etdi we ösdürdi. ýurtda we daşary ýurtdaky işini giňeltmek üçin kompaniýa.
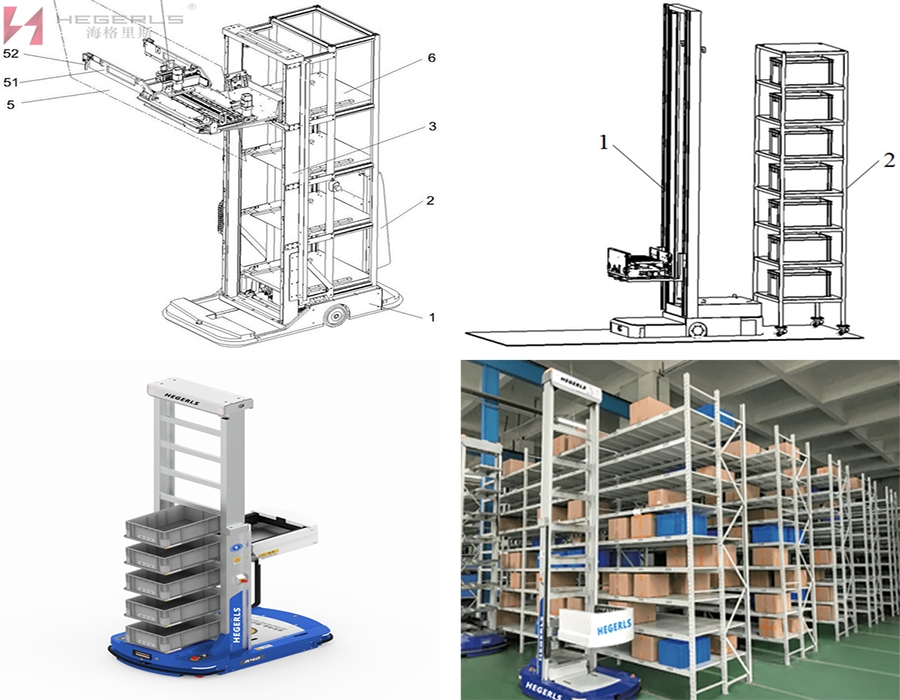
“Hegerls A42” köp gatlakly material guty roboty, özbaşdak gutulan köp gatly material guty robotynyň ikinji nesli bolup, material gutularyny akylly saýlamagy we saklamagy we bir wagtyň özünde birnäçe material gutularyny dolandyrmagy amala aşyryp biler (bir saparyň iň köp ýüki 300 kg ýetmeli). Täze akylly logistika işleýiş enjamy hökmünde, A42 hegerleri, hiç bir yzarlaýjy enjamyň kömegi bilen ammarda akylly ýöremegi amala aşyryp biler. Awtonom nawigasiýa, işjeň päsgelçiliklerden gaça durmak we awtomatiki zarýad bermek funksiýalaryna eýedir. Adaty AGV “tekjä adama” çözgüdi bilen deňeşdirilende, hegerler A42 köp gatly bin roboty has kiçi seçip alyş granulasyna eýe. Ulgam tarapyndan berlen sargyt talaplaryna laýyklykda, adaty “haryt gözleýän adamlardan” täsirli we ýönekeý “harytlara adama” akylly seçip alyş tertibine öwrülmegi hakykatdanam durmuşa geçirilýär. Staker we awtomatiki üç ölçegli ammaryň çözgütleri bilen deňeşdirilende, “A42” köp gatly bin robot ulgamy netijeli ýerleşdirilip bilner, umumy ýerleşdiriş bahasy pes we has çeýeligi; Şol bir wagtyň özünde, A42 hegerls tekjeler, gizlin AGV-ler, robot ýaraglar, köp funksiýaly iş stansiýalary we ş.m. ýaly dürli logistika enjamlary bilen doklamagy goldaýar. saklamagyň işleýiş netijeliligi, ammar dykyzlygyny optimallaşdyrýar we ammar pudagynyň awtomatlaşdyrylyşyny we akylly üýtgemegini amala aşyrýar.
Ulanylýan ssenariýa: 3PL, aýakgap we egin-eşik, elektron söwda, elektronika, elektrik energiýasy, önümçilik, lukmançylyk, bölek we beýleki pudaklarda ammar programmalaryna degişlidir.

Köp gatly bin robot hegerleriniň iş prinsipi A42:
Köp gatly bin robot hegerleri, buýruk bilen urlan gaplary işçileriň eline gönüden-göni alyp barýar. Işçiler wizual amal görkezmelerine laýyklykda çykmak amalyny aňsatlyk bilen tamamlap bilerler, bu işçileriň iş kynçylyklaryny ep-esli azaldýar we seçip almagyň netijeliligini ep-esli ýokarlandyrýar.
Köp gatly bin robot hegerleriniň funksional aýratynlyklary A42:
1) Adaty beýiklik: 4.33M, 1m-5.5m, çeýe özleşdirme;
2) Köp konteýner bilen işlemek, 8 konteýner çenli ýeke maşyn bilen işlemek;
3) 1.8m / s çenli doly ýük / ýük ýok hereket tizligi;
4) Harytlar takyk alynmaly we ýerleşdirilmeli, almagyň we ýerleşdirmegiň gözegçilik takyklygy mm 3mm bolmaly.
5) seçip almagyň takyklygy 99,99% -e çenli bolup, harytlary el bilen tapmak kyn we ýalňyşlyklary tapmak aňsat bolan seçip almak meselesini çözýär.

Köp gatly bin robot hegerleriniň artykmaçlyklary A42:
1) Adam-maşyn hyzmatdaşlygynyň netijeliligi ep-esli ýokarlandy
Urlan derejesi 99,99%; Iş netijeliligini 3-4 esse ýokarlandyryň
2) Netijeli ýerleşdirme we çalt ROI
Costokary çykdajyly awtomatiki we akylly ammar ýerini dörediň;
3) Çeýe uzaldylan köp enjamy birleşdirilen meýilnama
Hakyky iş ssenarilerine görä çeýe özleşdirmek, giňeltmek we işlemek;
4) Ylmy we tehnologiki täzelikler we ammar ýerlerinden netijeli peýdalanmak
6m ammaryň dik ulanylyş derejesi 85% -e ýetýär, bu adaty el ammaryndan 150% ýokary.
Häzirki wagtda akylly logistika tehnologiýasyny ulanmak has çuňňur we logistika işini has çeýe we täsirli edýär. “Hagerls” ammar üpjün edijileri önümlerini täzelemek üçin pudaklaýyn üýtgeşmeler bilen yzygiderli hyzmatdaşlyk edýärler we içerde we daşary ýurtlarda müşderiler üçin has akylly logistika çözgütlerini hödürlemegi maksat edinýärler.
Degişli habar teklipleri:
Ammaryň awtomatiki çözgüdi üçin Hegerls robotlary
Iş wagty: Iýun-28-2022