


Dört ýolly awtoulag üçin akylly robot | HEGERLS lýuboý görnüşi Dört ýolly gatnaw awtoulag ulgamynyň yzarlaýyş tehnologiýasy we ýalňyş dikeldiş funksiýasy
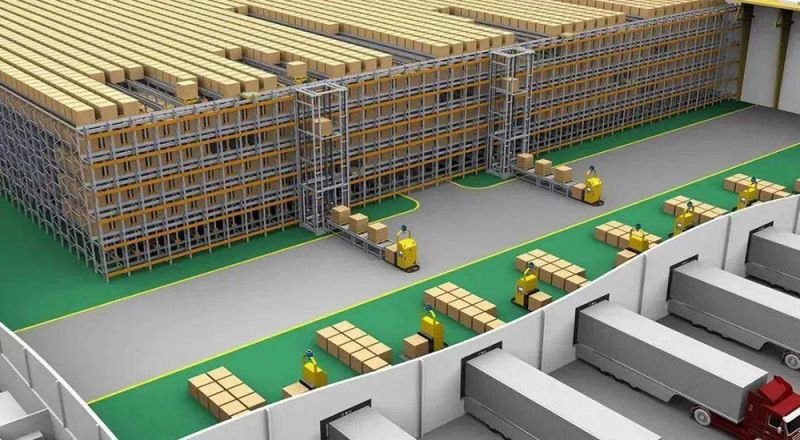
Logistika pudagynyň çalt ösmegi bilen, paletli dört taraplaýyn gatnaw görnüşli üç ölçegli ammar, tygşytly we dykyz saklaýyş funksiýalarynyň artykmaçlyklary, iş çykdajylary we yzygiderli akyl dolandyryşy sebäpli ammar logistikasynyň esasy görnüşleriniň birine öwrüldi. aýlanyş we ammar ulgamy. Palet dört taraplaýyn gatnaw awtoulagynyň üç ölçegli ammarynda iki iş tertibi bar: doly awtomatiki we ýarym awtomat, harytlary saklamagyň we ammar giňişliginiň ulanylyşynyň netijeliligini ep-esli ýokarlandyrýar. WMS, WCS ulgam programma üpjünçiligi we ERP / SAP / MES dolandyryş ulgamy programma üpjünçiliginiň integrasiýasy arkaly, harytlar tertipsiz ýa-da netijesiz el amallaryny ýok edip, birinji tertipde saklap biler. Hebei Woke, müşderiniň isleglerine we takyk tagallalaryna esaslanyp, Hagrid HEGERLS akylly lýuboýly dört taraplaýyn gatnaw dykyz saklaýyş ulgamyny işe girizdi.
HEGERLS akylly ammar lukmançylyk, himiýa, önümçilik, öý mebelleri, azyk, täze energiýa we awtoulag ýaly dürli pudaklara hyzmat etdi. Logistik tehnologiýa gözlegleri we ösüş innowasiýa mümkinçilikleri, şeýle hem ýumşak we gaty ýuka çözgütleri birleşdirmek ukybyna esaslanyp, köp müşderiniň göwnünden turdy. Ygtybarly operasiýa ulgamy, ylmy çeşmeleri birleşdirmek we berk dolandyryş tehnologiýasy bilen müşderilere ýokary netijelilik, ýokary dykyzlyk, ýokary çeýeligi we çalt eltip bermek arzan bahaly akylly saklaýyş çözgüdi bilen üpjün etmegi maksat edinýär.
Akylly dört taraplaýyn gatnaw awtoulag üç ölçegli ammar, akylly transport ulgamlary, palletizasiýa ulgamlary we gatlak üýtgeýän ulgamlar bilen ýokary we pes derejeli tekjeleri goldaýan dykyz palet saklaýyş görnüşleriniň köpüsine laýyk bolup biler. Çeýe we üýtgeýän gatnaw tagtasy + AGV (forklift) re modeimini, kiçi ene gatnaw tagtasynyň re modeimini, kiçi ene awtoulag re modeimini we ş.m. kabul edýär. Şol bir wagtyň özünde, gatlak beýikligi çäklendirilen pes derejeli palet ammarlaryny awtomatlaşdyrmak üçin oňat ammar çözgüdi.
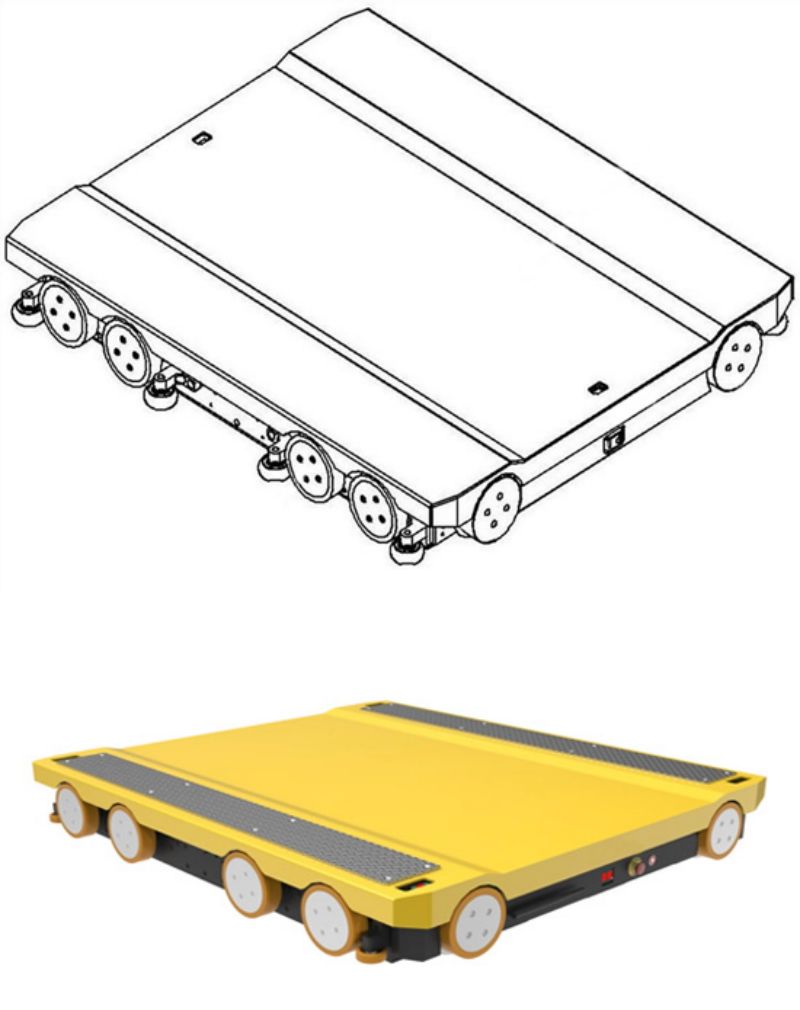
“Hagrid” intellektual lýuboý görnüşi Dört ýolly “Shuttle Vehicle”, awtomatiki usulda tersine öwrülişi we üýtgeýän ammar we işleýiş enjamlaryny yzarlaýan akylly ýol. Elektron dolandyryş ulgamynyň gözegçiligi astynda kodlaýjylar, RFID we fotoelektrik datçikleri ýaly sanly tehnologiýalar arkaly her giriş we çykyş stansiýasyny takyk kesgitleýär we akylly meýilnama ulgamy bilen enjamlaşdyrylýar. Materiallary alandan soň, akylly gözegçilik we traffigiň dinamiki dolandyryş funksiýalaryny birleşdirip, daşamak üçin awtomatiki usulda yza çekilýär. Highokary dykyzlykly ammar, işlemek we guty ýygnamak amallarynyň zerurlyklary bilen ýüzbe-ýüz bolup, ýokary çeýeligi bar we islendik gatnawy, köp prosesi çeýe meýilnamalaşdyrmagy, gutulary doly saýlamagy gazanmak üçin dinamiki hyzmatdaşlygy we tekiz awtomatiki transportyň çalt durmuşa geçirilmegine kömek edip biler. birlik materiallary. “Hagrid HEGERLS” akylly tarelkaly dört taraplaýyn gatnaw ulgamynyň özeni apparat ygtybarlylygy, aragatnaşyk we ýerleşiş tehnologiýasy, meýilnama ulgamy we ş.m. enjamlaryň ygtybarlylygy nukdaýnazaryndan, her bir ulag ulagy çaknyşygyň öňüni almak, lýubkany kesgitlemek, birnäçe datçik bilen üpjün edilendir, ulagyň işleýşine real wagt düşünmek üçin pyýada tigir burçuna gözegçilik we ş.m.

Hagridiň geçmişde alyp baran dürli kiçi we orta kärhana müşderileriniň beren pikirlerine esaslanyp, üç ölçegli ammarda dört taraplaýyn gatnawly ulagly akylly tarelka üçin iň möhüm aladanyň henizem iki nokady: demir ýol lýubo görnüşli dört taraplaýyn gatnaw ulgamynyň üýtgemegi tehnologiýasy we näsazlygy dikeltmek ýagdaýy. “Hagrid HEGERLS” lýuboý görnüşli dört taraplaýyn gatnaw ulgamynyň esasy artykmaçlyklary bu iki nokatda-da öz beýanyny tapdy.
HEGERLS Akylly lýubo görnüşi Dört ýolly gatnaw ulgamy yzarlaýyş tehnologiýasy
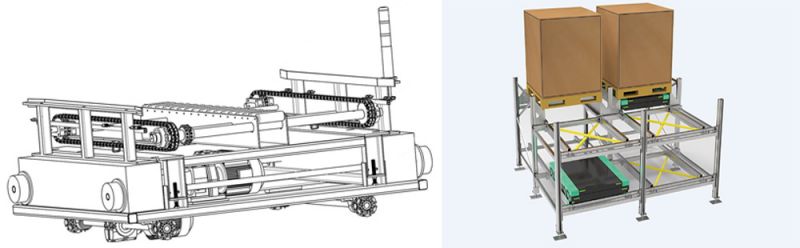
Trackol çalşygy mehanizmi tutuş ulagyň tersine işlemegini tamamlamagyň esasy bölegi. Awtoulag gurluşynyň durnuklylygyny we ygtybarlylygyny we her gurluş modulynyň ygtybarly we ýerlikli ýerleşişini göz öňünde tutup, “ähli ulagy ýolda götermek we iki tarapdan sinhron öwrülişik” görnüşi kabul edilýär. Tersine operasiýa geçirilende, çarçuwanyň düýbünde oturdylan tersine korpus ilki aşaklygyna süýşürilýär we tersine korpusa gönükdirilen ikitaraplaýyn hereket hereketi moduly kem-kemden 90 ° tersine öwrülýär, göteriş mehanizmi tutuş ulagy götermegi dowam etdirýär belli bir beýiklige, bu bolsa öz gezeginde ulagyň asyl hereket ýolundan ýokaryk we daşlaşmagy üçin ulagyň berk birikdirilen goşa hereketlendiriji hereket modulyny herekete getirýär, ulagyň tersine hereketini tamamlaýar we durnukly tersine öwrülýär. Götermek mehanizmi ulagyň korpusynyň içindäki gidrawliki silindrli porşon çybygynyň ýokarsynda kesgitlenendir, bu diňe daşaýyş wagtynda palet birliginiň ýüküni götermek bilen çäklenmän, palet bölüminiň ýükleri üçin esasy ýük göteriji mehanizmdir.
“Hagrid HEGERLS” intellektual lýuboý görnüşiniň ýalňyş dikeldilmegi Dört taraplaýyn gatnaw ulgamy
Programma üpjünçiliginiň näsazlyklary, gyssagly ätiýaçlyk elektrik üpjünçiligi, näsazlyklary halas ediji ulaglar, izolýasiýa torlaryny el bilen çözmek we ş.m. ýaly enjamlary dikeltmek üçin betbagtçylyklara taýýarlyk çözgütleri, şeýle hem müşderiler üçin belli bir ätiýaçlyk ulaglary ätiýaçlandyrmak üçin esasly basmak, diňe bir müşderiniň girýän we çykýan sargytlarynyň adaty bolmadyk ýokarlanmagyna garşy durmak bilen çäklenmän, nädogry ulaglary wagtynda çalşyp biler.
“Higris Warehouse Robot” -yň iş öndürijiligi, içerki we halkara sebitlerde köp sebitlere ýaýrady, iş tertibi gatnaw awtoulaglaryny, iki taraplaýyn gatnaw awtoulaglaryny, dört taraplaýyn gatnaw awtoulaglaryny, liftleri, gatnaw tekjelerini, deňiz tekjelerini, beýik üç ölçegli ammarlary öz içine alýar. we beýleki pudaklar. “Haigris Robotics”, iş gurluşyny yzygiderli optimizirläp, maşyn we senagat enjamlary pudagynda ösüşini elmydama dowam etdirýär. Шул içerde we daşary ýurtlarda köp bölüm we kärhanalar üçin mehaniki we önümçilik enjamlary hyzmatlary.
Iş wagty: 10-2023-nji oktýabr