


Dört taraplaýyn gatnaw ulagy üç ölçegli ammar, adaty awtomatiki, üç ölçegli ammar çözgüdi bolup, tertipsiz, tertipsiz, uly tarap gatnaşygy ýa-da kiçi görnüşli uly partiýa, köp dürli uly ammar ammarlaryna ulanylyp bilner. Esasy enjamy, dört taraplaýyn gatnaw, tegelek gatnawyň kemçiliklerini ýeňip geçýär we ýokary çeýeligi we çeýeligi bar. Uly üç ölçegli ammar ulgamlary üçin dört taraplaýyn gatnaw, ýokary çykdajylylyga eýe bolup, kiçi awtoulaglaryň sanyny köpeltmek we giriş we çykyş derejesini ýokarlandyrmak arkaly kämilleşdirilip bilner. Kiçijik ýa-da uly çykýan göwrüme garamazdan, dört taraplaýyn gatnaw awtoulagynyň üç ölçegli ammar çözgüdi gaty amatly.
Dürli ýüklere görä, bazardaky dört taraplaýyn gatnaw awtoulaglaryny iki görnüşe bölmek bolar: paletler we gaplar. Palet dört taraplaýyn gatnaw ýüzlerçe kilogram ýa-da ondanam köp ýük göterip biler, dört taraplaýyn konteýner bolsa onlarça kilogram konteýner ýüküni alyp biler. Ikisiniň gurluş görnüşi we dolandyryş usuly esasan meňzeşdir, esasan dizaýn jikme-jiklikleriniň we amaly ssenarileriniň tapawudy sebäpli.
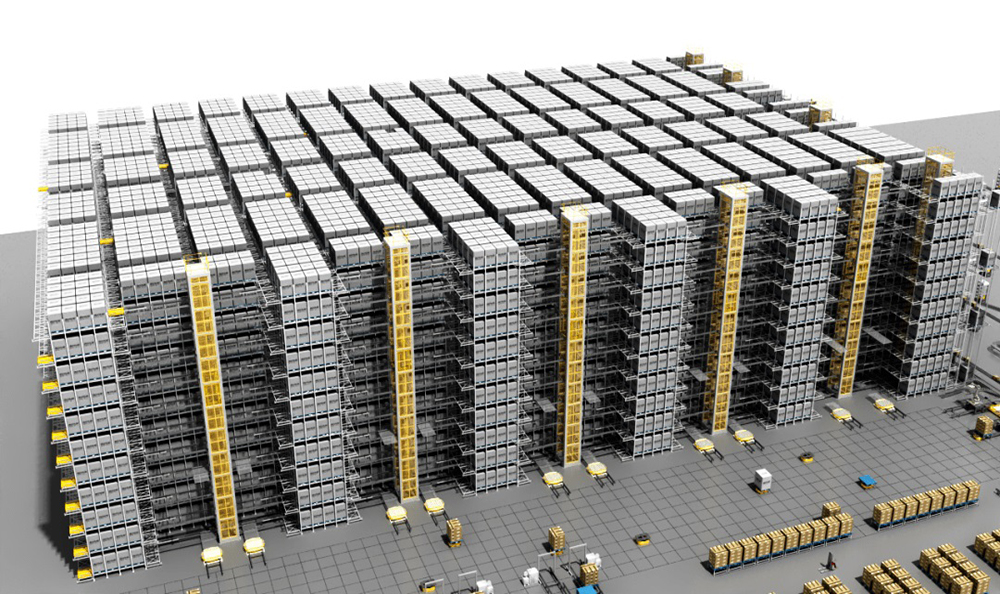
Gatnaşykly dört taraplaýyn gatnaw görnüşli awtomatiki dykyz saklaýyş ulgamynyň esasy enjamlary, dört taraplaýyn gatnaw awtoulaglaryny, ýörite dik liftleri we tekjeleri öz içine alýar. Gatnaşykly dört taraplaýyn gatnaw awtoulagynyň ykjam gurluşy, çalt işleýiş tizligi bar we simsiz aragatnaşygy kabul edýär. Köp ugurly dört taraplaýyn gatnaw awtoulaglary, dürli ýerleriň amaly zerurlyklaryny kanagatlandyryp bilýän görnüşde işleýär. Palet dört taraplaýyn gatnaw awtoulagy diňe bir goldaýan tekjelerde dört ugur boýunça syýahat edip bilmän, tekjeleriň içindäki gatlagyň üýtgemegine, tekjäniň ýerleşişiniň we ammar amallarynyň çeýeligini ýokarlandyrmaga dik liftleri hem ulanyp biler.
“Hagrid HEGERLS” akylly logistika intensiw gatnaw garaagey, akylly transport ulgamlary, palletizasiýa ulgamlary we gatlak üýtgeýän ulgamlar bilen pes derejeli tekjeleri goldaýan dykyz palet saklaýyş görnüşleriniň köpüsine duşup biler. Gatnaşyk tagtasy + AGV (forklift) re, imini, kiçi ene gatnaw tagtasynyň re modeimini we çeýe we üýtgeýän sub ene awtoulag re modeimini kabul edýär. Highokary we pes derejeli tekjeleri goldaýar we pes derejeli palet ammarlaryny beýiklik çäklendirmeleri bilen awtomatlaşdyrýar, Gowy çözgüt.

Onda “Hagrid HEGERLS” lýubo görnüşli dört taraplaýyn gatnaw ulgamynyň esasy tehnologiýalary haýsylar?
“HEGERLS Tray Dört ýol” gatnaw ulgamynyň esasy tehnologiýasy
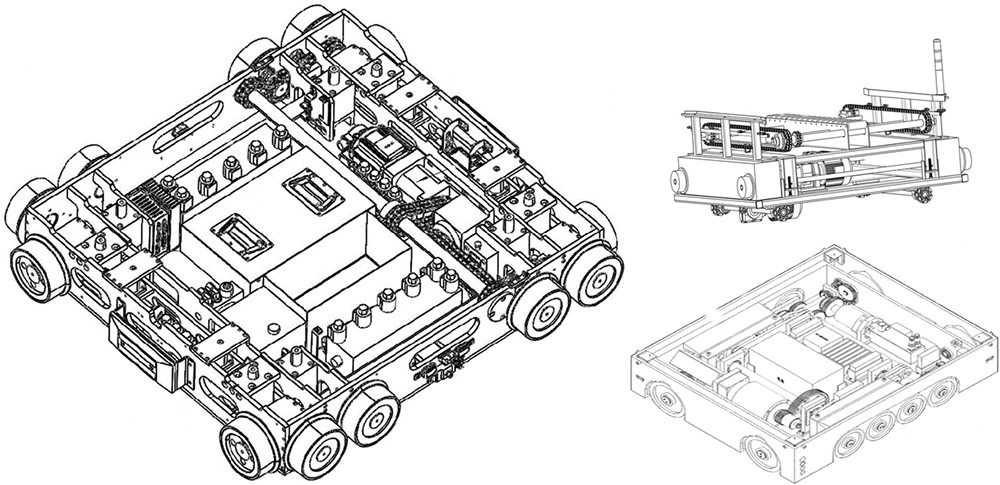
Gatnaşykly dört taraplaýyn gatnaw ulag ulgamynyň iň esasy özeni enjamlaryň, aragatnaşyk we ýerleşiş tehnologiýasynyň ygtybarlylygy, meýilnama ulgamy we ş.m. enjamlaryň ygtybarlylygy nukdaýnazaryndan, her HEGERLS gatnaw ulagy korpusy esasan ulanylýan köp datçik bilen üpjün edilendir. çaknyşygyň öňüni almak, lýuboýlary kesgitlemek, pyýada tigir burçuna gözegçilik we ş.m. ulagyň işleýşine hakyky düşünmegi üpjün etmek.
HEGERLS Gatnaşyk Dört ýolly gatnaw ulgamynyň esasy tehnologiýasy II
Gatnaşykly dört taraplaýyn gatnaw ulag ulgamynyň esasy tehnologiýasynyň iň tehnologiki we akylly tarapy demirýol çalşygy tehnologiýasydyr. Trackol çalşygy mehanizmi tutuş ulagyň tersine işlemegini tamamlamagyň esasy bölegi. Awtoulag gurluşynyň durnuklylygyny we ygtybarlylygyny we her gurluş modulynyň ygtybarly we ýerlikli ýerleşişini göz öňünde tutup, Hagrid HEGERLS “ýol götermekde ulag, iki taraplaýyn sinhron tersine” re modeimini kabul edýär. Operationagny, tersine operasiýa edilende, çarçuwanyň aşaky böleginde oturdylan tersine korpus tarapyndan aşak süýşürilmeli we ters tarapa gönükdirilen goşa hereketlendiriji hereket moduly kem-kemden 90 ° tersine öwrülýär, götermek mehanizmi dowam edýär tutuş ulagy belli bir beýiklige götermek, bu bolsa öz gezeginde ulagyň asyl hereket ýolundan ýokaryk we daşlaşmagy üçin ulagyň bilen yzygiderli birikdirilen goşa hereketlendiriji hereket modulyny herekete getirýär, ulagyň tersine hereketini tamamlaýar we durnukly tersine öwrülýär.
HEGERLS Gatnaşyk Dört ýolly gatnaw ulgamynyň esasy tehnologiýasy III
Gatnaşykly dört taraplaýyn gatnaw ulgamy üçin iň möhüm we kärhana müşderileriniň aladasy näsazlyklary çözmek meselesidir. Gözleg we ösüş topary we HEGERLS-iň tehniki işgärleri hem bu meseläniň çözgütlerine garadylar we teklip etdiler, şol sanda programma üpjünçiliginiň näsazlyklary üçin bir gezek basmagyň dikeldiş çözgüdi, gyssagly ätiýaçlyk elektrik üpjünçiligi, näsazlyklary halas ediş ulaglary ýaly enjamlary dikeltmek üçin betbagtçylyklara taýýarlyk meýilnamasy, pyýada izolýasiýa torlaryny el bilen çözmek we müşderiler üçin ätiýaçlyk ulaglaryň belli bir ätiýaçlygy. Bu diňe bir müşderiniň girýän we çykýan sargytlaryndaky adaty bolmadyk ýagdaýlar bilen iş salyşmak bilen çäklenmän, olary hem dolandyryp biler, Şol bir wagtyň özünde nädogry ulaglary wagtynda çalşyp bolýar.
“Hagrid HEGERLS” paletli dört taraplaýyn gatnaw awtoulagy, tekjeleriň tekjelerine, beýik forkliftlere we beýleki goldaw enjamlaryna garaşlylygyny ep-esli azaldyp biler. Şeýle hem, adaty gatnaw saklaýyş ulgamlarynyň elýeterliligini ep-esli ýokarlandyryp, ammar amallarynyň howpsuzlygyny ýokarlandyryp we gatnaw saklaýyş ulgamynyň gurluşyny optimizirläp biler. Materiallaryň saklanyş kanalyny materiallaryň transport kanaly bilen netijeli birleşdirýär, diňe tekjeleriň durnuklylygyny güýçlendirmek bilen çäklenmän, her bir material saklanýan ýerini logiki dolandyryş dolandyryş dinamiki ýerine ýetirip biler, gatnaw ammarlarynyň gurluşyk çykdajylaryny azaldyp, giňişlik ulanylyşyny gowulandyryp biler. ammar ulgamynyň tizligi we intensiw, akylly we awtomatiki ammar ulgamlarynyň ösüş düşünjesini çuňlaşdyrmak.
Iş wagty: 11-2023-nji sentýabr