


Soňky ýyllarda ýer baýlyklarynyň ýetmezçiliginiň we adam çykdajylarynyň ýokarlanmagy bilen ammar we logistika pudagynyň awtomatlaşdyrylmagy hemişe “çykdajylary azaltmak we netijeliligi ýokarlandyrmak” ileri tutulýan ugur hökmünde kabul edildi. Soňky ýyllarda ammar we logistika awtomatlaşdyryş enjamlary tükeniksiz ýüze çykdy, ýöne ammar operatorlarynyň elmydama agyry nokady bar: netijeliligi we çykdajylary göz öňünde tutmak kyn. Bu agyry nokady göz öňünde tutup, robotlaryň ýerleşdirilmegini 30% azaldyp, zähmet çykdajylaryny 66% azaldyp we sortlaşdyryş netijeliligini 3-4 esse ýokarlandyryp bilýän hegrisler topary guty pudagyna çuňňur gatnaşýar. ammar robot ulgamy. Kubao roboty üçin hegerls awtomatiki ýüklemek we düşürmek maşynlary bilen ýöriteleşýär, harytlar bilen adamlaryň arasynda täze täsirleşme tertibini kesgitleýär we saklamagyň netijeliligini hasam ýokarlandyrýar. Higgins hegerls awtomatiki ýüklemek we düşürmek maşyn iş stansiýasy harytlaryň interaktiw re modeimini ýene bir gezek adamlara öwürýär we köp konteýner ýüklemek we düşürmek üçin kubo-nyň täsirli köp konteýner işleýiş aýratynlyklaryny birleşdirýär, ammar we ammarlaryň netijeliligini ep-esli ýokarlandyrýar.

Gegerls awtomatiki ýüklemek we düşürmek maşyn iş stansiýasy awtomatiki ýüklemek we düşürmek maşynyndan, geçiriji liniýadan, wizual Kanban, ekiş diwaryndan we ýeňil sortlaýyş ulgamyndan durýar. Has awtomatiki ammar we düşüriş funksiýasyny amala aşyrmak üçin robot guty sebedinden material gutusyny awtomatiki düşürmek, eltip bermek we ýüklemek üçin kubao seriýaly robotlar bilen baglanyşdyrylýar. Iş stansiýasy has netijeli ýüklemek we düşürmek netijeliligine eýedir, bu 3S-de 6 konteýneriň ýüklenmegini we 5S-de 6 konteýneriň düşürilmegini tamamlap, robotyň netijeliligini ep-esli ýokarlandyryp biler; Modully dizaýn, çeýe we hereket etmek aňsat, enjamlaryň çalt ýokarlanmagyny / azalmagyny goldaýar we netijelilik we çykdajy zerurlyklaryny kanagatlandyrýar; Işçiler howpsuzlygy üpjün etmek üçin robotlardan bölünýärler; Ergonomiki dizaýna görä, seçip alýan konsolyň adamlaşdyrmagyň, amatly işlemegiň, saklamagyň we çykmagyň ýokary netijeliligi we ş.m. artykmaçlyklary bar .v

Hegerleriň awtomatiki ýüklemek we düşürmek maşyn iş stansiýasynyň dizaýn ýörelgeleri:
ETL we CE kepilnamasy bolan önüm hökmünde, awtomatiki ýüklemek we düşürmek enjamy, mehaniki howpsuzlyk, elektrik howpsuzlygy, funksional howpsuzlyk, ýangyn howpsuzlygy, hünär howpsuzlygy we saglyk, önümiň ygtybarlylygyny üpjün etmek babatynda berk synaglardan geçdi.
* Howpsuzlyk funksiýalary töwekgelçiligi azaltmak üçin standart ISO 12100 dizaýn ýörelgelerine esaslanýar;
* Dolandyryş ulgamy iec / en 60204-1 we ISO 13849-1 talaplaryna laýyklykda işlenip düzüldi we öndürildi we howpsuzlyk enjamlary (gulplama wyklýuçateli, gyssagly duralga) howpsuzlyk relýeleri bilen gözegçilik edilýär we diňe howpsuz şertlerde işleýär. Howpsuzlyk derejesi PL D-e ýetýär;
* Dolandyryş paneliniň we iş stolunyň dizaýny ergonomika laýyk gelýär;
* HMI (adam maşyn interfeýsi) adam maşyn interfeýsi elektrik şkafyna birleşdirilip, islendik howpuň öňüni almak üçin howply ýeriň daşynda ýerleşýär;
* Enjamyň ähli gapysy gulpy goramak enjamy bilen üpjün edilendir we gapyny açýan motor öçürilýär. Enjam diňe tutuş maşynyň gapysy ýapylansoň işini dowam etdirip biler. Bejeriş işgärleriniň howpsuzlygy iň ýokary derejede kepillendirilýär we howpsuzlyk töwekgelçiligi ep-esli azalýar;
* Göteriş ulgamy ýekeje ýalňyşlyga garşy durmak üçin niýetlenendir we ýapyk berkitme plitalary we gulplama gorag enjamlary bilen baglanyşykly töwekgelçiliklerden goralýar;
* Esasy howpsuzlyk enjamlary, Amerikan we Europeanewropa standartlarynyň talaplaryna laýyk gelýän enjamlar bolmaly.
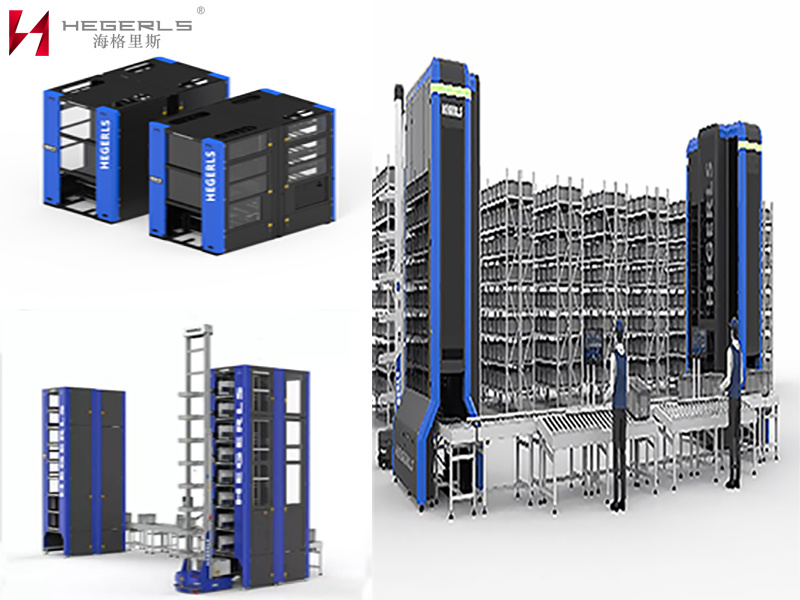
Hegerls awtomatiki ýükleýji iş stansiýasynyň iş prinsipi:
Konteýnerler hegerls awtomatiki ýükleýji iş stansiýasy bilen birikdirilen kubao roboty tarapyndan saýlanýar we dolandyrylýar. Birnäçe konteýneriň düşürilmegi 5S-de amala aşyrylýar we konteýnerler sortlanandan soň hegerls awtomatiki ýükleýji iş stansiýasyna gaýtarylýar. Konteýnerler amatly ammar we ammar amalyny görkezýän 3S-e ýüklenendir. Gegerls awtomatiki ýüklemek we düşürmek maşyn iş stansiýasy, harytlaryň sortlaşdyrylyşyny amala aşyrmak, giriş we çykmagyň ähli prosesini awtomatlaşdyrmak we ammar amallarynyň netijeliligini has-da ýokarlandyrmak üçin manipulýator bilen duralgany goldaýar.

Gegerleriň awtomatiki ýükleýji iş stansiýasynyň funksional aýratynlyklary:
* Netijeli we çalt - ýükleme tizligi 3S, düşüriş tizligi 5S
Hagerler awtomatiki ýüklemek we düşürmek maşyn iş stansiýasy kubao roboty üçin ýörite işlenip düzüldi. Birnäçe konteýneriň ýüklenmegini we düşürilmegini amala aşyrmak üçin ikisi akylly birleşdirildi. Her robot bir gezekde 6-8 konteýneriň ýüklenmegini bary-ýogy 3 sekuntda we düşürmegi 5 sekuntda tamamlap biler. Konweýer liniýasynyň iş stansiýasy bilen deňeşdirilende, robotyň ýükleniş we düşüriş tizligi 16 esse ýokarydyr.
* Çykdajylary azaltmak we netijeliligi ýokarlandyrmak - bir robotyň iş netijeliligini 30% ýokarlandyrmak
Kubao robotyna esaslanýan akylly saklaýyş çözgüdi, ammar dykyzlygyny 80% - 130% ýokarlandyryp we ammaryň iş netijeliligini 3-4 esse ýokarlandyryp biler. “Hagerls” awtomatiki ýüklemek we düşürmek maşyn iş stansiýasy bilen hyzmatdaşlykda kubao robot konteýnerleri awtomatiki ýükläp we düşürip biler, ýüklemegi (düşürmegi) we ýöremegi amala aşyryp biler we robotyň netijeliligi 30% ýokarlanyp biler. Şol bir wagtyň özünde, robot has köp sargyt meselelerini ýerine ýetirip biler, ulgamyň netijeliligini 30% ýokarlandyryp biler we ammar has täsirli bolar.
* Çeýe uýgunlaşma iş ssenariýasy - çeýe hereket, gurnama ýeriniň çalt üýtgemegi, güýçli ulalmagy
“Hagerls” awtomatiki ýükleýji iş stansiýasy modully dizaýny kabul edýär we kubao robotlarynyň doly toplumynyň dokalmagyny goldaýar. “Hagerls” awtomatiki ýükleýji iş stansiýasynyň ýöriteleşdirilen wersiýasy bir wagtyň özünde 8 konteýner ýükläp / düşürip biler. Hegerls awtomatiki ýüklemek we düşürmek maşyn iş stansiýasy ýerleşýän ýerini çeýe üýtgedip biler we iş ssenarilerine has ýakyn bolan iş şertlerine baglylykda iş stansiýalarynyň we konsollarynyň sanyny çeýe üýtgedip biler.
* Awtomatlaşdyrylan ýerleşdirmegiň bahasyny netijeli azaltmak
Kubo roboty we hegerls awtomatiki ýüklemek we düşürmek maşyn iş stansiýasynyň arasyndaky ajaýyp hyzmatdaşlyk, ammar awtomatlaşdyrylyşynyň çykdajylaryny netijeli azaldyp biler. Şol şertlerde hegerleriň awtomatiki ýüklemek we düşürmek maşyn iş stansiýasynyň konfigurasiýasy robotlaryň sanyny azaldyp, ammarda we düşürmegiň netijeliligini ýokarlandyryp biler we ammaryň durkuny täzelemegiň çykdajylaryny netijeli azaldyp biler.
* Adam re modeimine has ygtybarly gap
Gegerlleriň awtomatiki ýüklemek we düşürmek maşyn iş stansiýasy tarapyndan üpjün edilen täsirli “konteýner”, ýükleriň adam bilen özara täsirleşmeginiň täze usulyny döretdi. Hegerls awtomatiki ýükleýji iş stansiýasynyň dizaýny ergonomika laýyk gelýär we el bilen işlemegiň amatlylygyny ýokarlandyrýar. Harytlar, robot bilen göni aragatnaşyk saklamazlyk we iş howpsuzlygyny üpjün etmek üçin iş platformasynyň bellenen ýerinde el bilen saýlanyp bilner.
* Dürli enjamlaryň çeýe duralgasy
Dürli ulanylyş ssenariýalary üçin “hegerls” awtomatiki ýükleýji iş stansiýasy dürli enjamlaryň çeýe dokulmagyny goldaýar: ýükleri tertipleşdirmegi tamamlamak we “konteýner adama” netijeliligini has-da ýokarlandyrmak üçin hegerls awtomatiki ýükleýji iş stansiýasy birnäçe el bilen işlenip bilner. Şeýle hem awtomatiki tertipleşdirmegi we iş netijeliligini ýokarlandyrmak üçin mehaniki gollar we beýleki enjamlar bilen birikdirilip bilner.
* Adam bilen kompýuteriň dostlukly gatnaşygy - 900 guty / sagat ammar netijeliligi, el bilen ýygnamagyň netijeliligini 2-3 esse ýokarlandyrmak;
Aýratyn iş zerurlyklaryna görä, gaglar ýöriteleşdirilen shema dizaýnyny üpjün edýär. Hegerls awtomatiki ýüklemek we düşürmek maşyn iş stansiýasyny ulanyp, ammar netijeliligi sagatda 900 guty bolup biler, bu işiň netijeliligini ep-esli ýokarlandyrýar we el bilen saýlamagyň netijeliligini 2-3 esse ýokarlandyrýar.

Iş wagty: Iýul-08-2022