


Elektron söwda pudagynyň ösmegi bilen bazar has çalt paýlanmagy we logistika tizligini talap edýär. Şol bir wagtyň özünde, zähmet bahalarynyň ýokarlanmagy “adamlara harytlar” ulgamynyň bahasyny gaýtadan bahalandyrýar. Bazar kem-kemden “adamlara harytlar” ulgamynyň ammar we logistika basyşyny ýeňilleşdirip biljekdigine göz ýetirýär. Ammarlary awtomatlaşdyrmak prosesinde şu wagta çenli täze üýtgeşmeler bolup geçdi: adaty el bilen ammarlardan konweýer kemerlerini, ulag ulaglaryny we ş.m. ulanyp, awtomatlaşdyrylan ammarlara çenli. Häzirki wagtda emeli intellektiň we algoritmleriň ulanylmagy resmi taýdan ammar awtomatizasiýasynyň täze tapgyryna gadam basdy. Gerkules hegerleri awtomatiki ammar gurmagyň dürli logistika enjamlarynyň we tehnologiýalarynyň birleşdirilmegini talap edýändigini gowy bilýär. Recentlyaňy-ýakynda hegerler tarapyndan işlenip düzülen kubao ulgamy, ammardan ssenariýa görnüşine geçirişden ammara çenli bökdençsiz dokma funksiýasyny görkezýär. Şol bir wagtyň özünde, kubao ulgamy bilen robot goluň arasyndaky ajaýyp hyzmatdaşlyk kubao ulgamynyň ammar integrasiýa ukybyny has görnükli edip biler. Onda doly awtomatiki pilotsyz saklaýyş manipulýatory näme? Harytlary saklamakda haýsy agdyklyk edýär? 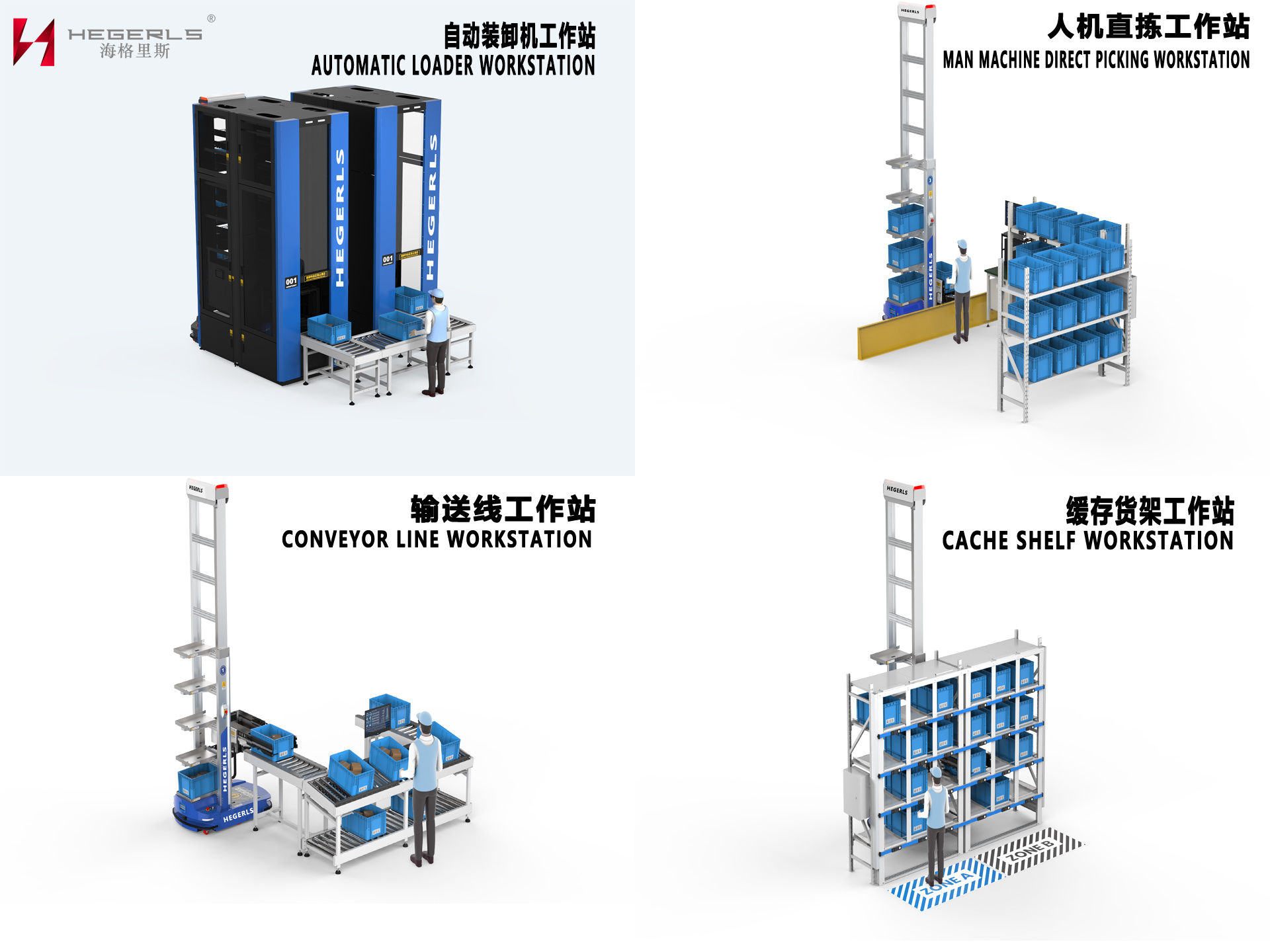 Gerkules Hegels ulanyjylaryň agyry nokatlaryna çuňňur göz aýlady, bazaryň täze zerurlyklaryna göz ýetirdi we dürli ssenariýalara laýyk gelýän innowasion çözgütleri yzygiderli ösdürdi. Adam bilen kompýuteriň özara gatnaşygy nukdaýnazaryndan, hagerlleriň özboluşly düşünjesi bar we awtomatiki ýükleýji iş stansiýasy, adam-kompýuter gönüden-göni sortlaýyş iş stansiýasy, konweýer liniýa iş stansiýasy, keş keş tekjesi we manipulýator iş stansiýasy ýaly birnäçe adam-kompýuter täsirleşiş rejelerini we shemalaryny düzdi. . Specificörite klassifikasiýa aşakdakylar: Ilki bilen, adam maşynlary göni saýlaýan iş stansiýasy Man-maşyn gönüden-göni sortlaýyş iş stansiýasynda operator gönüden-göni enjamyň sebedinde tertipläp bilýär we sortlamak diňe iş stansiýasyny we skaner ýaragyny düzmek arkaly tamamlanyp bilner. Ikinjiden, elektrik geçiriji liniýa Robot konweýer liniýasy bilen birleşýär. Robot material gutusyny konweýer setirine goýýar, konweýer çyzygy bolsa material gutusyny öňündäki adamlara iberýär. Adamlar gönüden-göni material gutusyny saýlaýarlar, bu operatoryň saýlamagy amatlylygyny ýokarlandyrýar we howpsuzlyk problemalaryndan gaça durýar. Üçünjiden, keş keş tekjesi Robot material gutusyny keş tekjesine goýýar we adamlar tekjede saýlaýarlar. Robotlar çykarylýar we netijeliligi boşadýar. Dördünjiden, awtomatiki ýükleýji iş stansiýasy Adam-kompýuter netijeliliginiň sinergiýasyna doly oýnamak üçin, hegis hegerler awtomatiki ýüklemek we düşürmek maşynyny oýlap tapdy, bu bolsa harytlaryň usulyny adamlaryň özara täsirine öwürdi. Kubao-nyň täsirli köp konteýner işleýiş aýratynlyklary bilen utgaşyp, birnäçe konteýneriň ýüklenmegine we düşürilmegine göz ýetirdi we ammarlaryň we ammarlaryň netijeliligini ep-esli ýokarlandyrdy. Awtomatiki ýükleýiş we düşüriş enjamy, guty saklaýan robot ulgamy üçin ýörite işlenip, harytlar bilen adamlaryň özara täsirleşiş tertibini hasam täzelär, ammar ulgamyndaky iş stansiýalarynyň görnüşlerini baýlaşdyrar we ammar amallarynyň netijeliligini ýokarlandyrar.
Gerkules Hegels ulanyjylaryň agyry nokatlaryna çuňňur göz aýlady, bazaryň täze zerurlyklaryna göz ýetirdi we dürli ssenariýalara laýyk gelýän innowasion çözgütleri yzygiderli ösdürdi. Adam bilen kompýuteriň özara gatnaşygy nukdaýnazaryndan, hagerlleriň özboluşly düşünjesi bar we awtomatiki ýükleýji iş stansiýasy, adam-kompýuter gönüden-göni sortlaýyş iş stansiýasy, konweýer liniýa iş stansiýasy, keş keş tekjesi we manipulýator iş stansiýasy ýaly birnäçe adam-kompýuter täsirleşiş rejelerini we shemalaryny düzdi. . Specificörite klassifikasiýa aşakdakylar: Ilki bilen, adam maşynlary göni saýlaýan iş stansiýasy Man-maşyn gönüden-göni sortlaýyş iş stansiýasynda operator gönüden-göni enjamyň sebedinde tertipläp bilýär we sortlamak diňe iş stansiýasyny we skaner ýaragyny düzmek arkaly tamamlanyp bilner. Ikinjiden, elektrik geçiriji liniýa Robot konweýer liniýasy bilen birleşýär. Robot material gutusyny konweýer setirine goýýar, konweýer çyzygy bolsa material gutusyny öňündäki adamlara iberýär. Adamlar gönüden-göni material gutusyny saýlaýarlar, bu operatoryň saýlamagy amatlylygyny ýokarlandyrýar we howpsuzlyk problemalaryndan gaça durýar. Üçünjiden, keş keş tekjesi Robot material gutusyny keş tekjesine goýýar we adamlar tekjede saýlaýarlar. Robotlar çykarylýar we netijeliligi boşadýar. Dördünjiden, awtomatiki ýükleýji iş stansiýasy Adam-kompýuter netijeliliginiň sinergiýasyna doly oýnamak üçin, hegis hegerler awtomatiki ýüklemek we düşürmek maşynyny oýlap tapdy, bu bolsa harytlaryň usulyny adamlaryň özara täsirine öwürdi. Kubao-nyň täsirli köp konteýner işleýiş aýratynlyklary bilen utgaşyp, birnäçe konteýneriň ýüklenmegine we düşürilmegine göz ýetirdi we ammarlaryň we ammarlaryň netijeliligini ep-esli ýokarlandyrdy. Awtomatiki ýükleýiş we düşüriş enjamy, guty saklaýan robot ulgamy üçin ýörite işlenip, harytlar bilen adamlaryň özara täsirleşiş tertibini hasam täzelär, ammar ulgamyndaky iş stansiýalarynyň görnüşlerini baýlaşdyrar we ammar amallarynyň netijeliligini ýokarlandyrar.

Soňky etapda, hegerler hem hegerls manipulýatoryny döretdiler, ýagny hegerler doly awtomatiki pilotsyz saklaýyş manipulýator iş stansiýasy, bu esasan el bilen däl-de, konweýer liniýasynyň iş stansiýasy ýa-da awtomatiki ýükleýji iş stansiýasy bilen dokalýar. Geçiriji liniýa ýa-da awtomatiki ýüklemek we düşüriş enjamy, düşürilmedik material gutularyny ýa-da ýüklenmeli material gutularyny awtomatiki ýetirmek üçin kubao seriýaly robotlar bilen birikdirilýär. Mehaniki gol, sargyt harytlaryny tertiplemek üçin işçileriň ýerini alýar we doly awtomatiki pilotsyz ammar amalyny amala aşyrýar. Akylly awtomatlaşdyrmagyň, iş güýjüniň nolunyň, ammarlaryň we ammarlaryň artykmaçlyklary bar. Kubao suw howdanynda akylly saklanyşy we işlemegi, mehaniki goly dokmagy, ownuk harytlary mehaniki gol bilen akylly tertipleşdirmegi amala aşyrýar we eltip bermek we ammar prosesi konweýer liniýasy bilen tamamlanýar. El bilen işlemek platformasynyň sortlaşdyryş prosesi goýulmady we pilotsyz işlemegiň ähli prosesi, harytlaryň gelmegi we önümçilik önümçiligi ýaly dürli amaly ssenariýalara degişlidir. Ulanylýan ssenariýa: esasanam supermarketiň bölek satuw önümleriniň seçimine degişlidir。


Hagerleriň funksional aýratynlyklary doly awtomatiki pilotsyz saklaýjy manipulýator iş stansiýasy Zähmeti azat etmek - doly awtomatiki we pilotsyz ammarlary amala aşyrmak, harytlary tertiplemek üçin işçileri çalyşmak we doly awtomatlaşdyrylan ammarlary we ammarlary amala aşyrmak; Akylly tertipleşdirmek - haiq akylly dolandyryş platforma ulgamy manipulýatoryň hereket dolandyryş ulgamy bilen üznüksiz birleşýär we manipulýatoryň harytlary tertiplemek üçin gönüden-göni görkezmeleri iberýär; Çeýe doklama - dürli iş ssenarileriniň zerurlyklaryny kanagatlandyrmak üçin kubao robotlary, konweýer liniýalary, keş keş tekjeleri ýa-da awtomatiki ýüklemek we düşüriş maşynlary bilen duralga; Netijeli ammar we ýalňyşlyk - her robot sagatda 25-35 guty / sagatda + 25-35 guty göterýär, ammar we egress netijeliligi bolsa 300 guty / sagada ýetip biler.


Hagerls gözleg we gözleg işlerine we akylly ammar robot ulgamynyň dizaýnyna ünsi jemleýär we täsirli, akylly we çeýe akylly ammar ulgamyny döretmek üçin robot tehnologiýasy we emeli intellekt algoritmi arkaly müşderiler üçin çykdajylary azaltmagy we netijeliligi ýokarlandyrmagy maksat edinýär. Bazaryň we müşderileriň ykrar edilmegi, Hegelsiň yzygiderli ösüşi üçin hereketlendiriji güýje öwrüler. Hagerls, gözleg we akylly ammar robot ulgamynyň dizaýnyna ünsi jemläp, innowasiýa we gözleg işleri bilen içgin meşgullanar. Şol bir wagtyň özünde, müşderileriň saklaýan agyry nokatlaryny çözmek we müşderileriň ammar zerurlyklaryny kanagatlandyrmak üçin has giň amaly ssenariýalary döreder. Robotlar we emeli intellekt tehnologiýasy, mümkinçilikler we kynçylyklar bilelikde ýaşap, ösüşiň altyn asyryna gadam basýar. Geljekde hagerler tehnologiki täzeliklere we üstünliklere ygrarly bolarlar, guty saklaýan robotlaryň segmentasiýasyna ünsi jemlärler we segmentiň ösüşine we ösüşine has öňe gitmek üçin müşderini saklaýan agyry nokatlaryna esaslanýan önümi we funksiýa matrisasyny kem-kemden optimizirlärler. senagaty.
Iş wagty: Iýul-08-2022