



Logistikany awtomatlaşdyrmagyň we intellektuallaşdyrmagyň yzygiderli ösmegi bilen kärhanalar indi diňe bir önümçilik liniýasynyň ýa-da ammaryň awtomatiki täzelenmegi we üýtgemegi bilen çäklenmeýär. Şonuň üçin tutuş zawodyň maddy-tehniki üpjünçiligi çaltlaşýar we uly logistika döwri gelýär. Şeýle-de bolsa, häzirki ykjam robot bazary görnüşinde, senagat ösüşiniň ýoklugy sebäpli, bir öndürijiniň önümçilik liniýasynyň, ammarynyň we ammar ammarynyň umumy işini özbaşdak tamamlamagy gaty kyn. Şonuň üçin wertikal we keseligine utgaşma häzirki döwürde köp ykjam robot öndürijileriniň strategiki saýlawyna öwrüldi.

HEGERLS bilen Hairou-nyň innowasiýa ugrundaky strategiki hyzmatdaşlygy
Soňky ýyllarda Hebei Walker Metal Products Co. zawodyň gapdalyndaky ammar, senagat taýdan işlemegiň täze eýýamyny açýar we bilelikde akyl logistika pudagyny ösdürmäge mümkinçilik berýär.

Hebei Walker Metal Products Co., Ltd. hakda [Öz markasy: HEGERLS]
1996-njy ýylda esaslandyrylan Hebei Walker Metal Products Co., Ltd. Demirgazyk Hytaýda tekjeler bilen meşgullanýan irki kompaniýa. 1998-nji ýylda ammar we logistika enjamlaryny satmaga we gurnamaga gatnaşyp başlady. 20 ýyldan gowrak ösüşden soň, ammar we logistika taslamasynyň dizaýnyny, enjamlaryny we desgalaryny öndürmek, satuw, integrasiýa, gurnamak, işe girizmek, ammar dolandyryş işgärlerini taýýarlamak, ammar we logistika bir bitewi hyzmat üpjün edijisine öwrüldi. satuw hyzmaty we ş.m., şeýle hem akylly önümçilige we akylly logistika gönükdirilen ýokary tehnologiýaly kärhana. Onuň işi ammar tekjelerini öz içine alýar: gatnaw tekjeleri Haç şöhle tekjesi, stereoskopik ammar tekjesi, üçek tekjesi, pol tekjesi, kantilwer tekjesi, ykjam tekje, erkin tekje, tekjede sürmek, agyrlyk tekjesi, orta tekje, dykyz tekje, polat platforma, poslama garşy tekje we ş.m. Saklaýan stereoskopik ammar: gatnaw stereoskopik ammar, şöhle stereoskopik ammar, üçek stereoskopik ammar, pol görnüşli stereoskopik ammar, kantilewer stereoskopik ammar, ykjam stereoskopik ammar, erkin stereoskopik ammar, stereoskopik ammarda sürmek, agyrlyk stereoskopik ammar we ş.m. Akylly saklaýyş enjamlary: gatnaw awtoulagy, iki taraplaýyn gatnaw awtoulagy, dört taraplaýyn gatnaw awtoulagy, staker, aşaky esasy awtoulag, lift, akylly iberiş we tertipleşdiriş ulgamy, dolanyşyk gutusy, palet, ammar kafesi, umumy AMR gözegçisi, awtomatiki forklift we ş.m. Ammar we saklaýyş ulgamy we çözgütleri: gatnaw awtoulaglary + forklift, gatnaw ýük awtoulaglary + stacker, sub awtobus + lift, dört taraplaýyn gatnaw awtoulaglary, AS / RS stacker, akylly transport we sortlaşdyryş ulgamy, wizual senagat ulgamy programma üpjünçiligi we akylly görüş çözgüdi industryhli pudaklarda müşderiler üçin bir bitewi çözgütler we hyzmatlar, we senagat informatizasiýasynyň, sanlaşdyrmagyň we intellektiň üýtgemegine we kämilleşdirilmegine ýardam bermek.
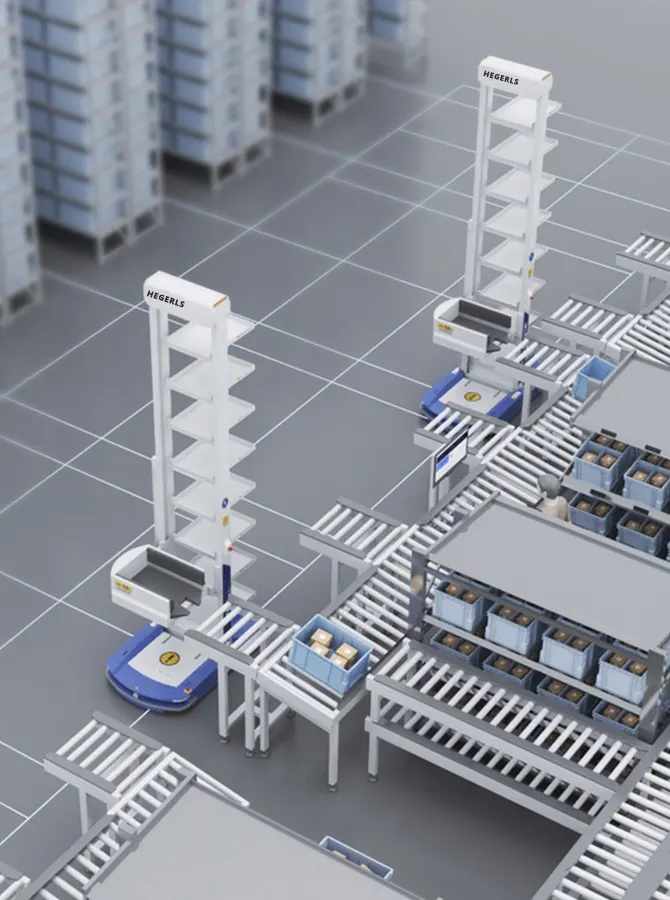
HEGERLS - lazer SLAM köp gatly gap, AGV robotyny saýlaýar
HEGERLS we Hairou Innovation tarapyndan bilelikde işlenip düzülen ilkinji senagat tehnologiýasy lazer SLAM köp gatly gaplaýjy AGV roboty, lazer SLAM nawigasiýasyny amala aşyryp biler. SRC ýadro gözegçisi bilen enjamlaşdyrylan we dört sany funksional aýratynlygy bar. Nawigasiýa, howpsuzlygy we köp funksiýany birleşdirýär. Çeýe doklamagy, takyk saýlamagy we ýerleşdirmegi we netijeli işlemegi amala aşyrýar. Akylly önümçilige mümkinçilik berýän zawod liniýa ammarynyň iň gowy hyzmatdaşy bolýar. Soňky ýyllarda bu täze robot iri we orta kärhanalaryň ünsüni özüne çekdi we köpüsi biragyzdan öwülýän we makullanan ony ulanmaga berdi.
SLAM (Bir wagtyň özünde lokalizasiýa we kartalaşdyrmak) real wagt ýerleşiş we karta gurmak tehnologiýasy diýilýär. Robot akylly saýlamak we işlemek, awtonom nawigasiýa, işjeň päsgelçiliklerden gaça durmak we awtomatiki zarýad bermek ýaly wezipelere eýedir. Lazer SLAM daşky gurşawyň nokat bulut kartasyny döretmek üçin daşky gurşawyň konturyny gözden geçirýär we soňra gurlan nokat bulut kartasyny ýerleşdiriş we nawigasiýa üçin lazer tarapyndan skanirlenen hakyky wagt nokady buludy bilen gabat gelýär. Senagat tehnologiýasy lazeri SLAM köp gatly material gutusy gizlin AGV robotyny alýar, ösen programma üpjünçiligi we apparat tehnologiýasy bilen birleşdirilen ýokary öndürijilikli guty görnüşli ammar roboty. Lineörite çyzykly ammar ssenarileri üçin ýörite işlenip düzülendir we takyk ýerleşişine ýetmek üçin lazer SLAM nawigasiýa tehnologiýasyny ulanýar. Senagat tehnologiýasy lazer SLAM köp gatly material gutusy, gizlin AGV robotyny saýlap, öňe we yza hereket edip biler we ýagdaýdaky islendik burça aýlanyp biler. Şol bir wagtyň özünde, ýokary durnuklylyk we ýokary takyklyk aýratynlyklary bar. Iň oňat howpsuzlyk päsgelçiliklerinden gaça durmak moduly we robotyň işjeň we passiw howpsuzlygy goramak çäreleri adam bilen maşynyň bölünişini amala aşyryp biler. Adamlar tötänleýin robot meýdanyna girenlerinde, akyl bilen tanap, duýduryş berip we ýapylmagyň goragyny amala aşyryp bilerler. Mundan başga-da, senagat tehnologiýasy lazeri SLAM bilen gabat gelýän gizlin AGV robotyny saýlaýan, köp sanly gap-gaç ammarlaryny çeýe dolandyrmak üçin örän amatly bolan işewürlik ulgamlary tarapyndan çykarylýan zerurlyklary üpjün edip biler. Programma üpjünçiligi ulgamy tutuş prosesiň dowamynda material maglumatlary awtomatiki usulda işleýär we ýygnaýar, kabul etmek we ibermek, saýlamak we paýlamak görkezmelerini takyk we netijeli ýerine ýetirýär, çyzykly ammaryň akylly dolandyrylyşyna düşünýär, ammardan we harytlaryň tertipli alynmagyna düşünýär. harytlar toplumyny takyk ammarlamak we müşderilere arassa önümçilige kömek edýär.

HEGERLS - lazer SLAM köp gatlakly AGV robotyny saklaýan agyry nokatlaryny çözmäge ünsi jemleýär
Human Adamyň ajaýyp dizaýny
Senagat tehnologiýasy lazer SLAM köp gatly material gutusy gizlin AGV robotyny saýlap, 0,4 m ~ 1,86 m erkin göterilmegini gazanmak, el bilen işlemek tertibine uýgunlaşmak, köp iş belentliklerine çeýe gabat gelmek, amatly iş tejribesini döretmek we adam etmek üçin adatdan daşary dizaýny kabul edýär. kompýuteriň özara gatnaşygy has dostlukly.
❑ Super çeýe ýerleşdiriş
Üýtgeýän iş gurşawyna jogap edip, gizlin AGV robotyny saýlaýan senagat tehnologiýasy lazerli SLAM köp gatly gap, iki ölçegli kod nawigasiýasy bolmazdan, iş ýeriniň çeýe üýtgemegine uýgunlaşýar, adaty gurnama liniýasynyň çäklendirmelerini bozýar we aýratyn önümçiligi amala aşyrýar we akylly önümçilige çeýe mümkinçilik berýär.
❑ Super çeýe dok
Zawodyň işi çylşyrymly we dürli-dürli, logistika enjamlaryna bolan isleg hem başga. Gizlin AGV robotyny saýlaýan senagat tehnologiýasy lazerli SLAM köp gatlakly gap, rolik, tekje, gizlin AGV, emeli iş stansiýasy we beýleki iş platformalary ýaly erkin enjamlar bilen çeýe dokalyp bilner, erkin alyp we ýerleşdirip bolýar we çäksiz dokup bolýar isleýşiňiz ýaly, has giň amaly ssenariýler bilen.
❑ Ultra takyk almak we ýerleşdirmek
Lazer SLAM köp gatly bin robot goldaw ulgamy birikdirildi we wizual AI materiallary takyk ýygnamak we ýerleşdirmek, materiallary akylly saýlamak we işlemek we ýokary netijeli işlemäge kömek etmek üçin ulanylýar.
❑ Öz-özüňi dolandyrmak
Senagat tehnologiýasy lazer SLAM köp gatlakly gaplaýjy gizlin AGV robotynyň şassisi hereketlendiriji tigirler we hereketlendiriji tigirler bilen enjamlaşdyrylandyr. Iki tigirli diferensial re modeim kabul edilýär, bu robotyň sürmegine we dar ýerlerde üýtgemegine amatly. Robot çalt öňe we yza çalt hereket edip biler, şeýle hem asyl ýerinde islendik burçda aýlanyp we ugruny üýtgedip biler. Senagat ylym we tehnologiýa lazer SLAM gizlin AGV robotyny alýan köp gatly material gutusy, kompýuter meýilnamalaşdyryş ulgamy tarapyndan berlen işleýiş we ýöremek görkezmelerine eýerýär, işleýiş tizligini, ugruny, tormozy we ş.m. sazlap bilýär we ýöreýiş ýagdaýyny habar bermäge goldaw berýär pilotsyz özbaşdak işlemegi gazanmak üçin meýilnama ulgamy. Robotyň köp howpsuzlyk mehanizmleri, özbaşdak işlemek prosesinde işgärleriň we robotlaryň howpsuzlygyny üpjün edip biler.
❑ Özüňe zarýad bermek
Senagat tehnologiýasy lazeri SLAM köp gatly material gutusy, gizlin AGV robotyny saýlaýan, öz-özüni zarýad bermek funksiýasyny amala aşyryp biler. Robotyň güýji tas tükenende, ses güýjüň ýeterlik däldigini görkezýär we iberiji ulgamyň buýrugy boýunça robot awtomatiki usulda zarýad beriş üýşmesine geçer. Robotyň zarýad beriş porty zarýad bermäge başlamak üçin zarýad sütüni bilen üstünlikli birikdirildi. Robotyň ygtybarly zarýad berilmegini üpjün etmek üçin içerki zarýad beriş gorag zynjyry bar. Doly zarýad alandan soň, robot zarýad bermegi awtomatiki bes eder.

❑ Howpsuzlygy goramak
Senagat tehnologiýasy lazer SLAM köp gatlakly material gutusy gizlin AGV robotyny saýlap alýan işgärleriň we tutuş ulgamyň ygtybarly we ygtybarly işlemegini üpjün etmek üçin birnäçe howpsuzlyk gorag funksiýalaryna eýedir.
❑ Ultra howpsuz nawigasiýa
Senagat ylym we tehnologiýa lazeri SLAM köp gatlakly gaplaýjy gizlin AGV roboty, Siangong Intelligence tarapyndan işlenip düzülen SRC kontrolleýeri bilen gurlup, roboty karta gurmak, ýerleşiş, nawigasiýa, köp maşyn meýilnamasy, awtomatiki zarýad bermek, 3D päsgelçilik ýaly esasy funksiýalary üpjün edýär. gaça durmak we ş.m., aşa howpsuz nawigasiýa düşünýär, işçileriň howpsuzlygyny goraýar we has akylly we täsirli çylşyrymly adam maşyn garyşyk meýdan gurşawyna laýyk gelýär.
❑ Sesli we wizual duýduryş we ses soragy
Senagat tehnologiýasy lazer SLAM köp gatlakly gaplaýjy gizlin AGV roboty eşidilýän we wizual duýduryş funksiýasyny üpjün edýär we ulanyjylar robotyň işleýiş ýagdaýyny eşidilýän we wizual duýduryş maglumatlary arkaly hakyky wagtda bilip bilerler.
Safety Howpsuzlygy gyssagly goramak
Robotyň we operatorlaryň howpsuzlygyny üpjün etmek üçin robot korpusy şassi gabygynyň çep öň we sag tarapynda we çep we sag göteriji sütünleriň iki tarapynda dört sany gyssagly togtatmak düwmesi bilen enjamlaşdyrylandyr. Gyssagly duralganyň howpsuzlygyny goramak dürli adatdan daşary ýagdaýlarda işgärleriň we enjamlaryň howpsuzlygyny ýokarlandyryp biler. Gyssagly duralganyň howpsuzlygyny goramak üçin gyssagly durmak düwmesini basyň we gyssagly durmak düwmesini täzeden düzmek üçin düwmäni sagat ugruna öwüriň.
❑ Goragdan goramak
Robotyň sag tarapyndaky göteriji sütüniň aşagynda ýerleşýän, ýykylmagyna garşy elektromehaniki birleşdiriji enjam, tehniki işgärler roboty düýpli abatlanda, göterilmeginiň we ýykylmagynyň öňüni almak üçin ulanylýar. Fallingykylmagyna garşy göteriji wyklýuçatel “göteriji gulplama” ýagdaýyna öwrülende, robot götermek mehanizmi gulplama ýagdaýyna girýär, göteriş mehanizmi saklanýar we goşa howpsuzlygy goramak üçin elektrik togy kesilýär. Fallingykylmagyna garşy göteriji wyklýuçatel “göteriji gulpy açmak” enjamyna çekilende, göteriji motor adaty göteriş hereketini dowam etdirýär. Bejeriş işgärleri robotda yzygiderli tehniki hyzmat etmek we näsazlyklary düzetmek bilen, wilkanyň gaçmagynyň öňüni almak we işgärleriň howpsuzlygyny goramak üçin göterijiniň ýykylmagyna garşy wyklýuçatelini “göteriji gulp” ýagdaýyna öwürmeli.
Coll Çaknyşykdan goramak
Senagat tehnologiýasy lazeriniň SLAM köp gatly gaplaýjy gizlin AGV robotynyň şassisiniň öň we yzky gyralary, robotyň we işgärleriň howpsuzlygyny netijeli gorap bilýän roboty çaknyşmakdan goramak üçin howpsuzlyk kontaktlary bilen enjamlaşdyrylandyr. Päsgelçilik lazer radar päsgelçiliklerinden gaça durmak modulynyň kesgitleýiş beýikliginden pes bolsa, robotyň howpsuz aragatnaşygyna zarba urup biler. Päsgelçilik urlanda howpsuzlyk kontakty basylýar we dolandyryş zynjyryna maglumat iberilýär we robot gyssagly tormozlaýar we howpsuzlygy goramak tertibine girýär. Bu wagt ýokarky gyzyl çyra uzak wagtlap ýakylýar, şassiniň öň we yzky görkeziji çyralary ýakylýar we buzzer ses sesi bilen bilelikde yzygiderli damja duýduryş sesini iberýär.
❑ Tor aragatnaşygy
Senagat tehnologiýasy lazer SLAM köp gatly gap, gizlin AGV robotyny saýlaýan Wi Fi ýa-da 5G we beýleki aragatnaşyk usullaryny goldaýar. Robotyň iş ýagdaýyna we saglyk ýagdaýyna hakyky wagtda gözegçilik edip bilýän simsiz ulgam arkaly akylly dolandyryş platformasyna birikdirilip bilner. Kadadan çykma ýüze çykanda, robot kadadan çykma maglumatlary tor arkaly akylly dolandyryş platformasyna habar berýär we tehniki işgärler kadadan çykma gündeligine we beýleki maglumatlara görä meseläni çözüp bilerler.
Intellektual dolandyryş
Senagat tehnologiýasy lazeri SLAM köp gatlakly gaplaýjy gizlin AGV roboty, akylly dolandyryş platformasyna we üçünji tarap dolandyryş platformasyna girmegi goldaýan ýokary akylly robotdyr. Akylly dolandyryş platformasy daşarky dolandyryş ulgamy bilen birleşip, degişli iş amallaryny gaýtadan işläp, maglumatlary derňemegi we wizual dolandyryşy amala aşyryp bilýän robotyň akylly beýnisidir; Birnäçe robotlaryň we dürli logistika enjamlarynyň hakyky wagtda meýilleşdirilmegini üpjün ediň, ulgam saglygynyň çaklamasyny we gözegçiligini amala aşyryň we güýçlendirmek okuwy we çuňňur öwreniş esasynda ulgamy optimizirläň. Akylly dolandyryş platformasy akylly ammarlary, ammarlary we beýleki amallary amala aşyryp biler. Operator diňe programma üpjünçiliginiň interfeýsindäki iş düwmesine basmaly we robot meýilnama ulgamy boýunça buýrugyň dürli meselelerini özbaşdak ýerine ýetirer.
HEGERLS we HAIROO Innovation tarapyndan bilelikde işe girizilen ilkinji lazer SLAM köp gatly bin roboty çyzykly işlemekde möhüm rol oýnar, önümçilik enjamlary bilen gaplaryň netijeli işlemeginiň arasynda çeýe duralga ýeter we müşderiler üçin has uly gymmatlyk döreder. Şol bir wagtyň özünde, HEGERLS bilen HAIROO-nyň arasyndaky innowasion hyzmatdaşlyk strategiýasynda HEGERLS Kubao robotlarynyň birnäçe görnüşini hem hödürledi: köp gatlakly robot HEGERLS A42, goşa çuňlukly robot HEGERLS A42D, karton saýlaýan robot HEGERLS A42N, teleskopik göteriji bin roboty HEGERLS A42T, guty saklaýan robotlaryň dürli amaly ssenarilerini kem-kemden öz içine alýar, has köp saklaýyş agyry nokatlaryny çözmäge we müşderilere has köp bahany ýokarlandyrmaga üns berýär. Geljekde iki tarap umumy ösüşi gazanmak üçin akylly önümçiligiň we akylly ammaryň has köp mümkinçiliklerini öwrenmegi dowam etdirer.
Iş wagty: Noýabr-02-2022