


Döwrebap logistika pudagynyň çalt ösmegi bilen dört taraplaýyn gatnaw ulagy üç ölçegli ammar, netijeli we dykyz ammar funksiýalary, iş çykdajylary we yzygiderli akyllylygy sebäpli artykmaçlygy sebäpli üç ölçegli ammarlaryň esasy görnüşleriniň birine öwrüldi. ammar ulgamynda dolandyryş. Içerki we halkara ammar we logistika umumy göwrüminiň yzygiderli ösmegi, şeýle hem pes temperaturaly önümlere bolan isleg bilen sowuk zynjyr bazarynyň ulanylyş potensialy açylmagyny dowam etdirýär. Hakyky işde, sowuk saklaýyş kuwwatynyň ýeterlik däldigi, köne infrastruktura we dolandyryş mehanizmleriniň ýoklugy sebäpli önümiň hiline we sarp edijiniň howpsuzlygyna çynlakaý howp salýan “zynjyr bozulmalary” bolýar.
Sowuk zynjyr pudagynyň häzirki ýagdaýyna esaslanyp, Hebei Woke Metal Products Co. ygtybarly, täsirli we doly gözegçilik edilýän zynjyry emele getirýär.
“Hebei Woke Metal Products Ltd. sowuk ammar awtomatlaşdyrylan akylly ammarlar, ammar raf integrasiýasy (ammar raf integrasiýasy) akylly sowuk ammar, dört taraplaýyn gatnaw awtoulaglary, ene-atalar üçin awtoulag gatnawlary, gatnaw tagtalary, stakerler, konweýer liniýalary, tertipleşdiriş liniýalary, polat gurluş üçek platformalary, üçek tekjeleri Awtomatlaşdyrylan ammar tekjeleri , ýokary derejeli tekjeler, dürli görnüşli ammar tekjeleri, ulgam integrasiýasy we beýleki ammar tekjeleri, ammar dolandyryş programma üpjünçiligi we ammar enjamlary. Kompaniýada ýokary takyklykly awtomatiki sowuk egirme önümçilik liniýalary we dürli görnüşli gaýtadan işleýiş enjamlary, doly awtomatiki asma pürküji liniýalar, bejergiden öňki arassalaýyş we partlaýyş ulgamlary ýaly ajaýyp enjamlar bar. Epoksi rezin, poliester rezin ýa-da metal poroşok, statiki garşy pürküji we awtomatiki kebşirläp biler.

HEGERLS dört taraplaýyn gatnaw, sowuk zynjyryň sowadyjy pudagy üçin täze ammar modelini döredýär
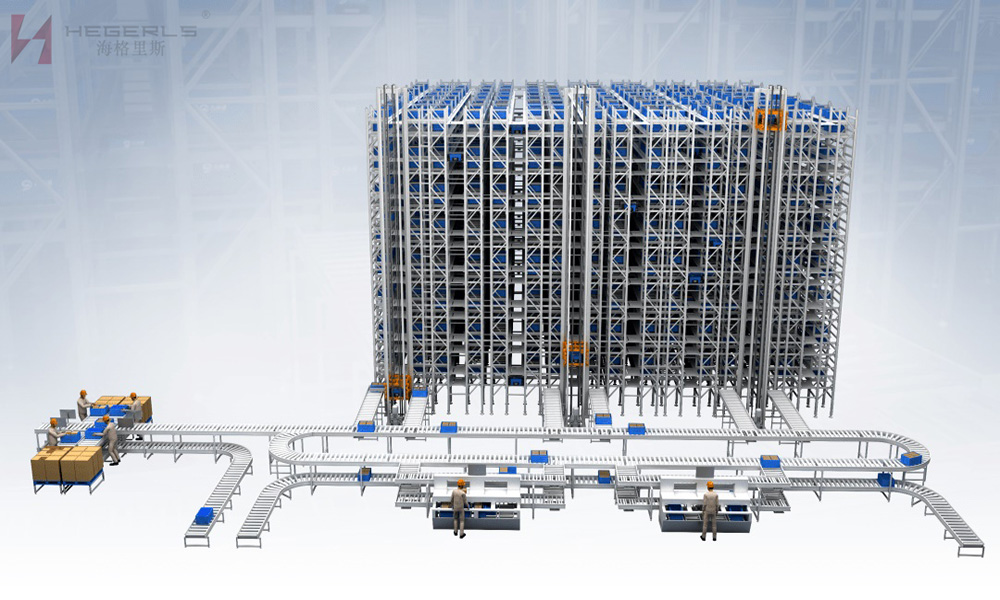
HEGERLS dört taraplaýyn gatnaw sowuk zynjyr saklaýyş ulgamy, sowuk zynjyr üç ölçegli saklaýyş enjamy, esasan sowuk zynjyrly dört taraplaýyn gatnaw awtoulagyndan we sowuk zynjyr üçin ýörite polatdan ýasalan gurluşdan ybarat, sowuk ammaryň geçiş netijeliligini kesgitleýär. we akylly sowuk ammaryň esasy düzüm bölegi bolup durýar.
HEGERLS akylly dört taraplaýyn gatnaw ulagy sowuk zynjyr saklaýyş ulgamy, dört, pyýada, öň, yz, çep we saga dört tarapa ýöremek üçin iki sany tigirli otly ulanýar. Tutuş diapazonda gorizontal bölümleriň akylly saklanyşyny, daşalmagyny, paýlanyşyny we zolagyny üýtgedýän amallary öz içine alýar we gatlagyň üýtgemegini, girmegini we çykmagyny tamamlamak üçin sowuk zynjyr göteriji maşyn bilen hyzmatdaşlyk etmek üçin konweýer liniýalaryny ýa-da beýleki işleýiş desgalaryny ýerleşdirýär. sowuk zynjyr gurşawynda dört taraplaýyn gatnaw ulaglary we palet enjamlary. Şol bir wagtyň özünde, akylly ammar dolandyryş ulgamy bilen birleşdirilip, tutuş sowuk zynjyryň saklanýan ýerinde ammar bölümleriniň üç ölçegli dinamiki dolandyryşyna takyk gözegçilik ediň.
Ulgam dizaýnynda HEGERLS dört taraplaýyn gatnaw sowuk zynjyr saklaýyş ulgamy, ýokary derejeli modul garaşsyzlygy bilen modully dizaýny kabul edýär. Awtoulaglaryň biri näsazlyk sebäpli şowsuz bolsa, ulgamdaky beýleki awtoulaglar henizem özbaşdak işlemegini dowam etdirip bilerler. Nädogry ulagy aýyrandan soň, tehniki işgärler ätiýaçlyk şaýlary modulyny çalt çalşyp bilerler; Şeýle hem ulgam awtoulaglaryň sanynyň köpelmegini ýa-da azalmagyny goldaýan, geljekki ösüş üçin zerur çeýeligi üpjün edýän we girýän we çykýan has amatly netijeliligi üpjün edip, oňat göwrümliligine eýedir.
Her bir ýük üçin ammar we gözleg ýerini talap edýän adaty stacker enjamlary bilen deňeşdirilende, HEGERLS dört taraplaýyn gatnaw sowuk ammary, iň ýokary dykyzlygy gazanmak üçin şeýle saklama ýerini azaldýar we ammar kuwwatynyň 20% -ini tygşytlap bilýär. Sowuk ammar gurluşygy üçin ýokary iş çykdajylarynyň çäginde, saklaýyş kuwwatynyň iki esse ýokary ykdysady gymmaty bar.

Soňky ýyllarda HEGERLS dört taraplaýyn gatnaw awtoulagynyň köp pudaklaýyn ýaryşlarda tapawutlanmagynyň we sowuk zynjyr logistika pudagynda köp kärhananyň ykrar edilmeginiň sebäbi esasan:
1) Ajaýyp mümkinçilikleri bolan AI tehnologiýasy
Hebei Woke, işewürlik amallary üçin uzak möhletli durnukly we ygtybarly maglumat ulgamynyň goldawyny üpjün edip biljek pudakda ykrar edilen AI mümkinçiliklerine eýedir. Giňişleýin köp robotly netijeli gözleg we global meseläni utgaşdyrmak ulgamyň dykyz saklanyş we ammarlaryň netijelilik meselesini has gowy çözmegine kömek edip biler.
2) Ajaýyp önümlere eýe bolmak
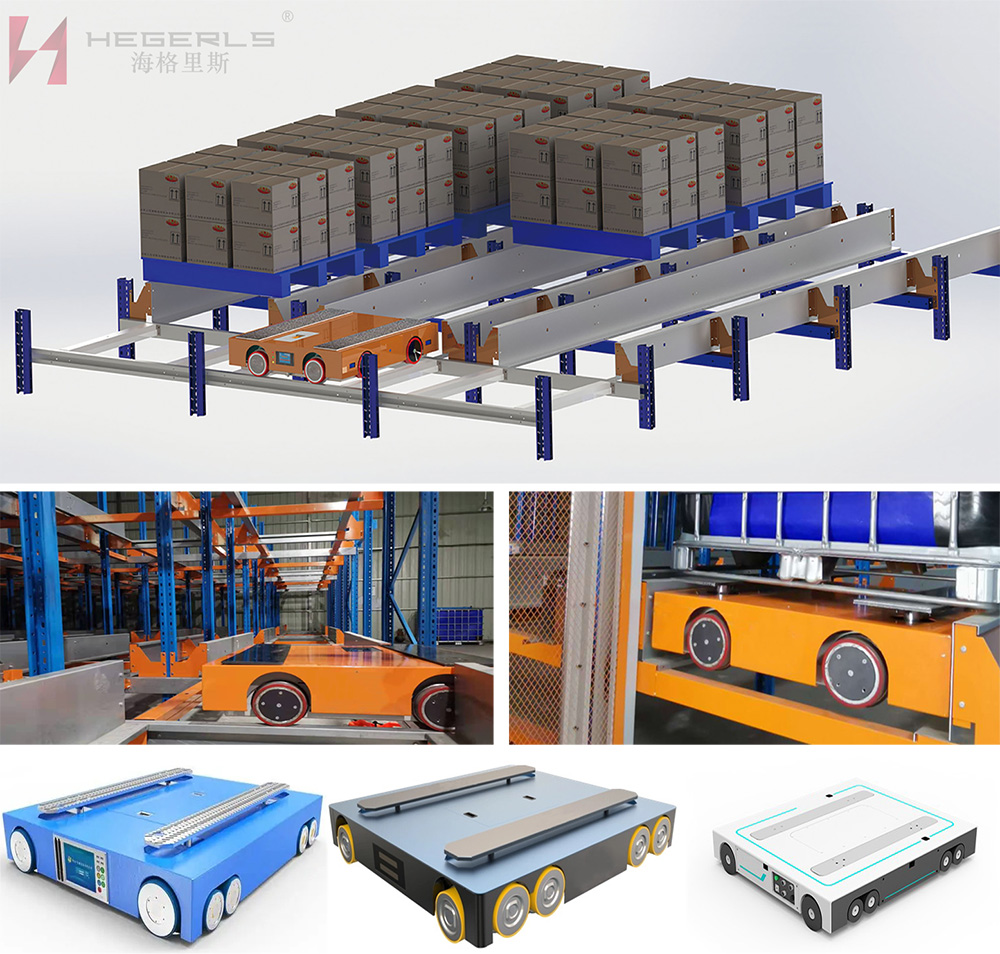
HEGERLS dört taraplaýyn gatnaw, ýokary ýerleşiş takyklygy, güýçli ýük we çydamlylyk mümkinçilikleri, tizlik ýaly önümçilikde öňdebaryjy görkezijiler we giriş we çykyş amallarynda has ýokary netijelilik bilen aşa pes temperaturany goldap biler. Dört taraplaýyn ulagyň HEGERLS sowuk saklaýyş wersiýasy durnukly we ygtybarly bolup, birnäçe gezek berk synagdan we barlagdan geçdi.
3) Güýçli ammar çözgütleri we gowşuryş mümkinçilikleri
Hebei Woke, müşderileriň zerurlyklaryna we işewürlik nokatlaryna çuňňur düşünip bilýän, geljekde ýol hereketini gowulandyrmak ýaly dürli taraplary doly göz öňünde tutup bilýän we hünär ussatlygy we ygtybarlylygy bilen kärhana müşderileriniň ykrar etmegine eýe bolan hünärmen taslama topary bar. Mundan başga-da, Hebei Woke HEGERLS robot enjamlary köp sanly mysallary döretdi we ýokary derejeli we çylşyrymly taslamalary ýerine ýetirmek ukybyna eýe.
Tehnologiýany birleşdirmek we ösdürmek bilen HEGERLS dört taraplaýyn gatnaw, akylly meýilnamalaşdyrmak, iş netijeliligini ýokarlandyrmak we has çalt we has takyk ýerleşdiriş usullary bilen has akylly amallara ýetmek ýaly dürli tehniki jikme-jiklikleri yzygiderli optimizirlär. Şol bir wagtyň özünde, ýokary çykdajy basyşyny ýeňilleşdirer we tygşytly häzirki zaman logistika enjamyna öwrüler.
Iş wagty: Awgust-08-2023