


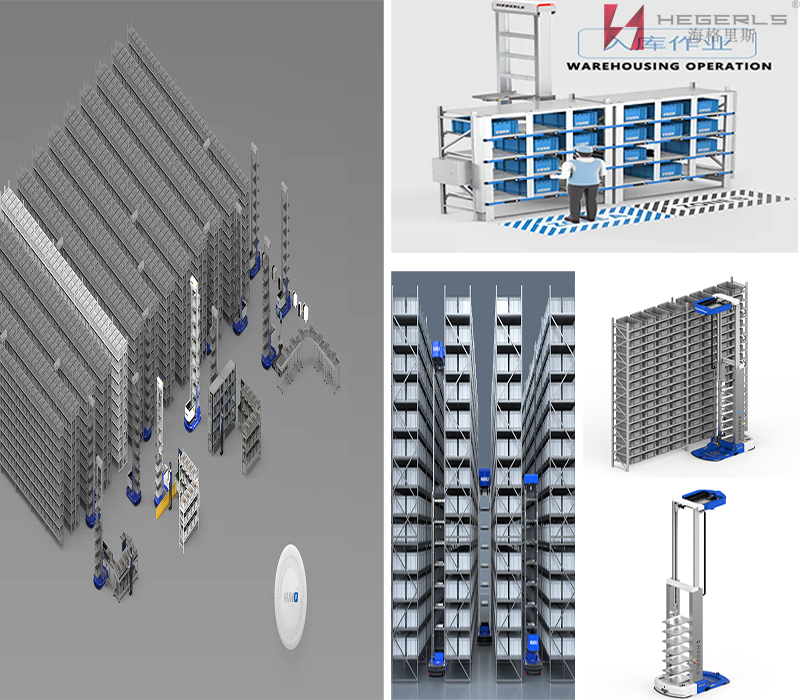
Ammar kärendesiniň ýokarlanmagy bilen, logistika ammarlarynda saklanyş dykyzlygynyň ähmiýeti ýokarlanar. Hut şu düşünje we müşderilere ünsi jemlemek, hegerler toparyny teleskopik göteriji bin robotyny öwrenmäge we ösdürmäge itergi berdi. Teleskopiki göteriji konteýner roboty bolan hegerls a42t-iň çykmagy, hegerleriň müşderileriň saklaýyş agyry nokatlaryny yzygiderli ýygnamagynyň önümidir, bu hegerleriň guty saklaýan robot önümleriniň ýene bir täzeligini görkezýär, has köp kärhanalara ammar awtomatlaşdyrylyşyny üýtgetmäge, ammary gowulandyrmaga kömek edýär dykyzlygy we ultra ýokary çeýe ammar dörediň.
Teleskopiki göteriji bin robot hegerls a42t
“Kuba” hegerls a42t teleskopik göteriji guty roboty, özbaşdak döredilen, 10 metr beýik ammaryň saklanyş dykyzlygyny ýokarlandyrmak üçin niýetlenendir. Alýan beýikligi 0,35m ~ 8m bolup, tertipsiz we deň bolmadyk beýik ammarlarda material gutularyny ýygnamagy, saklamagy we işlemegi, ultra giň üç ölçegli ammar çeýeligini gurşap alýar we ammar ulanyş derejesini ep-esli ýokarlandyrýar. Täze akylly logistika işleýiş enjamy hökmünde, a42t hegerler, hiç bir yzarlaýyş enjamynyň kömegi bilen ammarda akylly ýöremegi amala aşyryp biler we awtonom nawigasiýa, işjeň päsgelçiliklerden gaça durmak we awtomatiki zarýad bermek funksiýalaryna eýe. Akylly algoritm, ýokary we pes sowuk we yssy ammar ýerleriniň netijeliligini, sebitlere girmek we tertipleşdirmek, robotlaryň tertipsiz we deň däl ammarlarda netijeliligini üpjün etmek üçin optimallaşdyrýar. Adaty AGV "tekjä adama" çözgüdi bilen deňeşdirilende, granular saýlaýan kubao roboty has kiçi. Ulgam tarapyndan berlen sargyt talaplaryna laýyklykda, adaty "haryt gözleýän adamlardan" täsirli we ýönekeý "harytlardan adama" akylly seçip alyş tertibine öwrülmegi hakykatdanam amala aşyrylýar. Staker we awtomatiki üç ölçegli ammaryň çözgütleri bilen deňeşdirilende, kubao robot ulgamy umumy ýerleşdiriş bahasy pes we has çeýeligi bilen netijeli ýerleşdirmegi amala aşyryp biler; Şol bir wagtyň özünde, a42t hegerls tekjeler, gizlin AGV-ler, robot ýaraglar, köp funksiýaly iş stansiýalary we ş.m. ýaly dürli logistika enjamlarynyň dokalmagyny goldaýar. amallar, ammarlaryň dykyzlygyny optimallaşdyrýar we ammar pudagynyň awtomatlaşdyrylyşyny we akylly üýtgemegini amala aşyrýar. Ulanylýan ssenariýler: 3PL, aýakgap we egin-eşik, elektron söwda, elektronika, elektrik, önümçilik, lukmançylyk, bölek we beýleki pudaklarda ammar amaly programmalary, esasanam tertipsiz we deň bolmadyk beýiklik ammar ssenarileri, şeýle hem robotlaryň zerur bolan ssenarileri üçin amatly. ýangyn söndüriji ýerlerden çeýe geçip, liftleri göteriň
Teleskopiki göteriji bin robot hegerlleriniň funksional aýratynlyklary a42t
Iň ýokary pikap beýikligi 8 metr, ultra giň üç ölçegli ammar;
Köp konteýner bilen işlemek, 8 konteýner çenli ýekeje enjam bilen işlemek;
Dinamiki giňligi sazlamak çeňňegi dizaýny, köp ölçegli kartonlar / gaplar bilen utgaşykly.
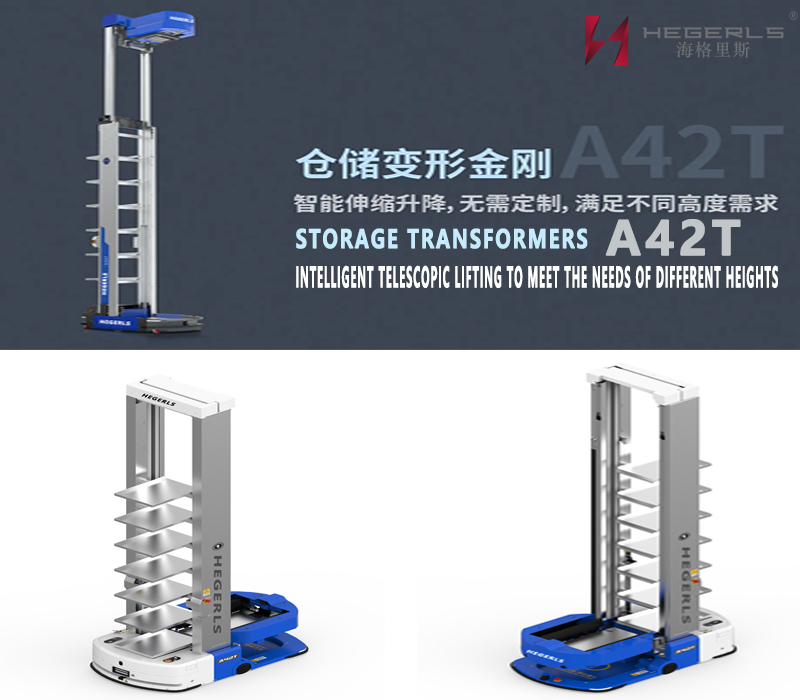
“Hegerls a42t”, ýokary çeýe we teleskopiki göteriji guty roboty
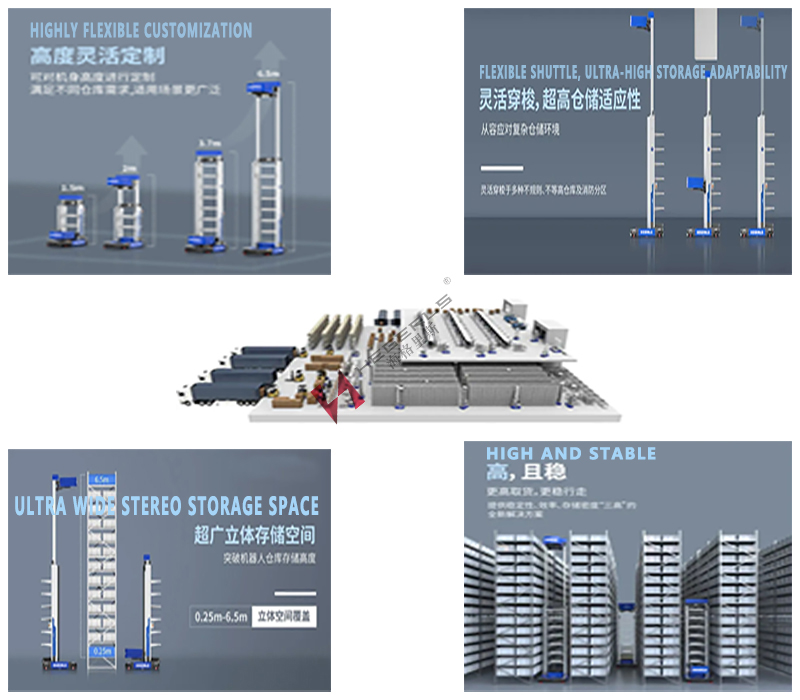
1) Modully özleşdirme ýok, akylly teleskopiki götermek
Modully ýöriteleşdirilen robot bilen deňeşdirilende, a42t teleskopiki göteriji bin robot hegerls akylly teleskopiki götermek funksiýasyna eýedir. 3,7 m göwrüm 6,5 metre çenli ýokarlandyrylyp, ammar giňişligini has köp ulanyp we aşa ýokary çeýe ammary amala aşyryp bolar.
2) 0,25 metrden 6,5 metre çenli, ultra giň stereo saklaýyş giňişligi
Teleskopiki göteriji bin robot a42t robot ammarynda saklanýan beýikligi ýene bir gezek döwýär. Robotyň iň pes giriş diapazony 0,25 m, iň ýokary bolsa 6,5 metre ýetip biler, ultra giň üç ölçegli giňişligi gurşap alar we saklaýyş dykyzlygyny ýokarlandyrar.
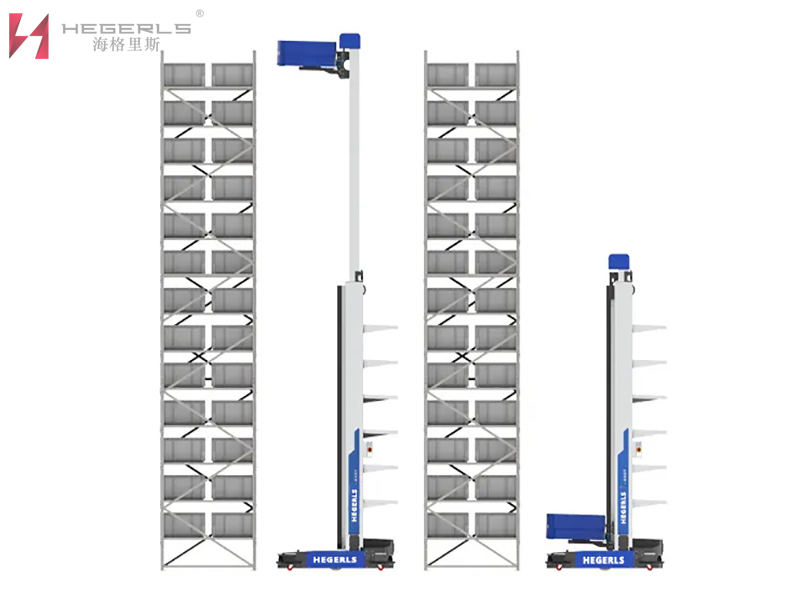
3) andokary we durnukly
Hilini ýokarlandyrmak üçin has ygtybarly we ygtybarly bolmaly. Teleskopiki göteriji bin robot a42t 6.5m tekjedäki gaplara girişi, işleýşini we tertipleşdirilmegini amala aşyryp biler. Şol bir wagtyň özünde bedeniň beýikligi bary-ýogy 3,7 m. Robot has durnukly we çalt ýöräp, "üç ýokary" durnuklylygyň, netijeliligiň we saklaýyş dykyzlygynyň täze çözgüdini üpjün edýär.
4) Çeýe özleşdirme dürli zerurlyklary kanagatlandyrmak mümkin
Teleskopiki göteriji binanyň roboty bolan Hegerls a42t, her bir ammaryň dürli zerurlyklaryny kanagatlandyrmak üçin bedeniň beýikligini sazlap bilýän we has giň ssenariýalara degişli çeýe özleşdirme hyzmatlaryny hödürleýär.

Mümkinçiligiň daşynda · ähli zerur ammar zerurlyklaryny açyň
1) Akylly uýgunlaşdyrylan tertipsiz ammar, aşa ýokary ammar uýgunlaşmagy
Teleskopiki göteriji guty roboty bolan “Hegerls a42t”, ammar uýgunlaşmasyny hasam gowulandyrýar, dürli tertipsiz we deň bolmadyk beýik ammarlaryň üsti bilen çeýe hereket edýär, ýangyn turbalary, gurluşyk şöhleleri we ş.m. sebäpli ýüze çykýan çylşyrymly ammar gurşawyny rahatlyk bilen ýeňip geçýär, ammar çäklerini azaldar. awtomatlaşdyryş öwrülişigi, saklanyş dykyzlygynyň çägine oýnaýar we has köp saklamaga mümkinçilik berýär.
2) Fireangyndan goramak / ýangyn bölümi, sebitleşdirmegiň netijeliligi
Ammardaky ýangyn / ýangyn bölümi, iki zonanyň deň däl netijeliligine eltmek aňsat. Teleskopik göteriji bin robot herls a42t-iň özboluşly teleskopiki göteriş funksiýasy, roboty ýangyn bölüminiň iki tarapynyň arasynda aňsatlyk bilen geçmäge, dürli saklanýan ýerleriň netijelilik talaplaryna çeýe jogap bermäge, bölümleriň arasynda robotlaryň özara geçirilmegine düşünmäge we ýetmäge kömek edýär. ulanmagyň iň ýokary derejesi.
3) Lift alyň we ýokaryk we aşak gatnaň
Teleskopiki göteriji binanyň roboty bolan Hegerls a42t, lift götermek, ýokarky we aşaky gatlaryň arasynda erkin gatnawy amala aşyrmak, has giňişleýin ammar amallaryny öz içine alýar we dürli gat ammarlarynyň we önümçilik liniýalarynyň duralgasyna düşünip biler. Customöriteleşdirilen çözgütler bilen birleşdirilip, müşderileriň isleglerini kanagatlandyryp biler.
4) Amatly transport we çalt ýerleşdirmek
A42t teleskopiki göteriji bin robot hegerleriniň “ykjam” ululygy daşamagy we dolandyrmagy aňsatlaşdyrýar, ýerleşdiriş tizligini ýokarlandyrýar, taslamanyň umumy ýerine ýetirilişiniň netijeliligini ýokarlandyrýar we çykdajylary azaldýar we müşderiler üçin has çalt netijeliligi ýokarlandyrýar.
Hegerls
Hagerls, robot we emeli intellekt algoritmleri arkaly netijeli, akylly, çeýe we ýöriteleşdirilen ammar awtomatlaşdyryş çözgütleri bilen üpjün etmegi, her zawod we logistika ammary üçin gymmatlyk döretmegi maksat edinýär. Haggis, robot ontologiýasy, aşaky ýerleşiş algoritmi, dolandyryş ulgamy, robot meýilnamasy, akylly saklaýyş dolandyryş ulgamy ýaly esasy elementleriň garaşsyz gözleg işlerine göz ýetirip, guty saklaýan robot ulgamynyň dizaýnyna ünsi jemledi we patent berdi. ýerleşişi. Kubao ulgamy işlenip düzülen we täjirçilik taýdan ulanylýan ilkinji guty saklaýan robot ulgamy. 3PL, aýakgap we geýim, elektron söwda, elektronika, elektrik, önümçilik, lukmançylyk we beýleki pudaklarda ulanyldy. Kubao ulgamyny ulanyp, müşderiler bir hepdäniň içinde ammaryň awtomatiki üýtgemegine, ammar dykyzlygyny 80% - 130% ýokarlandyryp we işçileriň iş netijeliligini 3-4 esse ýokarlandyryp bilerler.
Iş wagty: Iýul-01-2022